- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
モーションキャプチャを用いた遠隔操作システムの開発(H22)
| 大学校及び設置科 | 東海職業能力開発大学校 生産システム技術系共同開発 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | 安全衛生、画像処理、ネットワークプログラミング、マイコン制御、センサ工学 |
| 課題に取り組む推奨段階 | 少なくとも,ネットワークプログラミング,マイコン制御およびセンサ工学の学科・実習が終了した後で取り組んだほうが望ましいです. |
| 課題によって養成する知識、技能・技術 | 画像処理・ネットワークプログラミングおよびマイコン制御によるロボット制御の技術また,人の動作の計測データから動作を推定するための信号処理の知識も養成されます。 |
製作の目的と概要
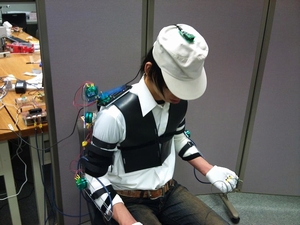
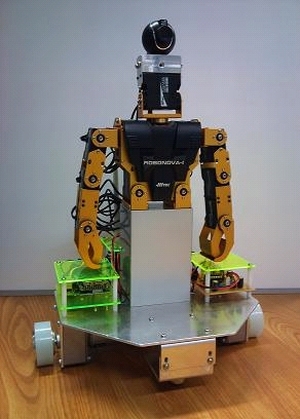
本テーマでは,モーションキャプチャを用いて操縦者の上半身の動作を解析することにより,遠隔地に設置したロボットの制御を行うシステムの開発を行いました.この課題を通して,画像処理・ネットワークプログラミングおよびマイコン制御によるロボット制御の技術を習得し,柔軟な動きを実現している人の動作をセンシングするシステムの検証を行いました.
成果
本件のシステムの特徴として
・操縦者(以下オペレータ)の動作がそのままロボットの動作に反映
・ロボットの動作制御が直感的
・ロボット視点がオペレータへ画像としてフィードバック
・遠隔地との音声による通信
です.「遠隔地との音声による通信」機能は学生の発案で,付加価値として音声通信機能も実装しています.また,ロボットの移動は,オペレータの足元に設置したフッドペダルで行うことができるようにしました.