- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
ゲーム機用コントローラ操作型ロボットの製作(H22)
| 大学校及び設置科 | 中国職業能力開発大学校 附属福山職業能力開発短期大学校 制御技術科 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | 安全衛生、機械加工、数値制御加工、設計・製図、CAD、マイコン制御、センサ |
| 課題に取り組む推奨段階 | 機械製図、力学、CAD実習、数値制御加工実習及びマイコン制御実習後 |
| 課題によって養成する知識、技能・技術 | 題を通して、主にメカニズム設計及びレーザー加工技術、マイコン制御の実践力、パソコンプログラム、無線通信の知識等を身に付けます。 |
製作の目的と概要
成果
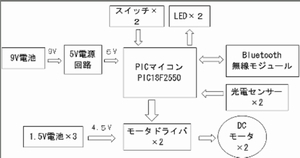
ロボットを制御するための制御回路の設計、製作を行いました。制御用コントローラとして、16ビットマイコンを使用、Wii®リモコンからの操作指令は、市販のBluetooth®無線モジュールで受信し、指令に従ってモータドライバを経由して、DCモータを正転逆転させます。