- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
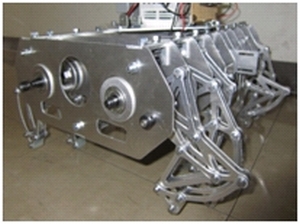
多足歩行ロボットの設計・製作 (H23)
| 大学校及び設置科 | 中国職業能力開発大学校 機械制御技術科 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | メカトロニクス工学、機械製図、機械要素設計、シーケンス制御、電子回路、CAD実習?・?、機械加工、数値制御 |
| 課題に取り組む推奨段階 | 専門課程2年 |
| 課題によって養成する知識、技能・技術 | メカトロニクス、機械設計製図、PLC制御、電子回路製作、2D-CAD、3D-CAD、レーザー加工、マシニングセンター、旋盤・フライス応用 |
製作の目的と概要
★技能・技術習得目標:
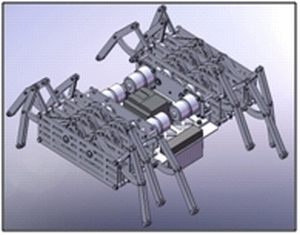
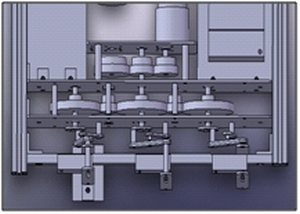
3次元CADを使用した設計・図面展開技術を習得します。加工技術を考慮した設計形状を担当教官・学生間で相談します。購入部品の予算を考えた選定、加工部品の材料選定・加工機械の選定をするなど、多くの部分を今までの学習経験から自己決定します。積極的な取り組みが必要です。
成果
★アピールポイント:
ロボット競技会ではたくさんのロボットが完走しなかった中、製作したロボット3台の内2台が完走し、2位と特別賞になりました。複雑な12足のリンク機構には会場から大変注目されました。
※この課題情報シートには、学生が作成した予稿原稿が含まれています。