- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
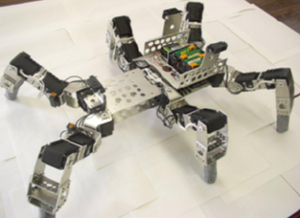
六足歩行ロボットの製作(H18)
| 大学校及び設置科 | 関東職業能力開発大学校 制御技術科 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | 力学、安全衛生、メカニズム、設計・製図、計測・制御、電気・電子 |
| 課題に取り組む推奨段階 | 機械製図およびメカトロニクス実習終了後 |
| 課題によって養成する知識、技能・技術 | 課題を通して、主にメカトロニクスに関する実践力を身に付ける |
製作の目的と概要
そこで、小型の二足歩行ロボットに用いられるサーボモータを利用して、安定した歩行が可能な多足歩行ロボットを製作し、マイコン制御技術と各種加工技術の向上を図る機会としました。(図1)
成果
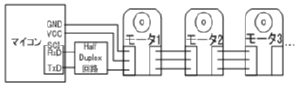
本課題を通して、学生はマイコン周辺の回路技術、PICマイコンの使い方、赤外線通信の仕方、複数人数でのC言語によるプログラム開発、レーザー加工機の使い方等についての基礎技術を学ぶことができました。
特にプログラミング技術に関しては著しい向上が見られ、専門課程卒業後には組込みやリアルタイムOSに興味を示すまでになりました。