- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
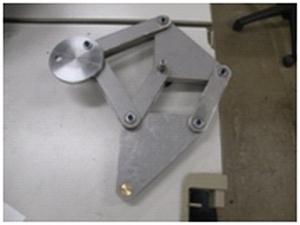
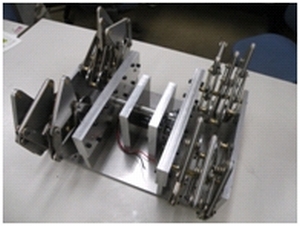
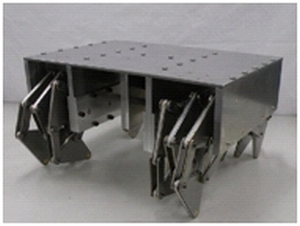
搭乗型多脚歩行ロボットの製作(H23)
| 大学校及び設置科 | 職業能力開発総合大学校 小平キャンパス 生産技術科 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | 機械要素設計、機械加工実習(?・?)、機械設計製図(?・?)、精密加工実習、精密機械設計、CAD実習(?・?)、制作実習(精密機械) |
| 課題に取り組む推奨段階 | 専門課程2年 |
| 課題によって養成する知識、技能・技術 | 機械設計技術、3次元モデリング、機械加工技術、組立・調整技術、センサとモータの取扱い |
製作の目的と概要
★技能・技術習得目標:
リンク機構型移動機械の製作を通して、ものづくりに必要な設計・加工技術及び組立・調整技術を習得します。また、センサ出力を用いたモータ駆動の仕方についても学びます。
成果
★アピールポイント:
ポリテクビジョンの発表会で、実際に学生がロボットに搭乗して、センサを搭載した操作部の傾き動作による前進・後進歩行をすることができました。しかもテオ・ヤンセン機構の脚による歩行のため生物的な動きとなるため、インパクトのあるデモを行うことができました。
※この課題情報シートには、学生が作成した予稿原稿が含まれています。