- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
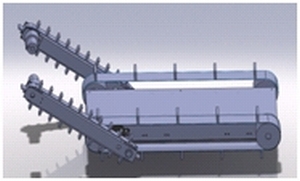
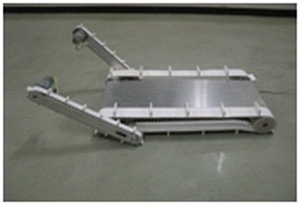
不整地走行可能なコントロールカーの製作(H23)
| 大学校及び設置科 | 関東職業能力開発大学校 制御技術科 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | メカトロニクス実習、インターフェース実習、機械設計製図、機械加工実習(?・?)、CAD実習(?・?) |
| 課題に取り組む推奨段階 | 専門課程2年 |
| 課題によって養成する知識、技能・技術 | メカトロニクス技術、インターフェース技術、機械設計・CAD製図、機械加工技術 |
製作の目的と概要
そんな中、侵入困難な場所の撮影や情報収集を行う災害用ロボットの活躍を目の当たりにしました。
この災害用ロボットが侵入困難な原因となっている不整地を走行しているところに着目し、総合制作実習として取り組むことにしました。
★技能・技術習得目標:
課題を通して、電気の力(電池・モータ)を使い目的の動作(階段走行)を作り出す時に必要な機械・電気技術を習得します。
成果
※この課題情報シートには、学生が作成した予稿原稿が含まれています。