- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
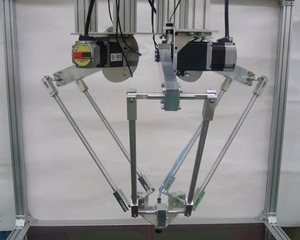
パラレルリンクロボットの開発(H23)
| 大学校及び設置科 | 北陸職業能力開発大学校 生産システム技術系共同開発 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | 生産機械システム技術科:機械設計技術、機械加工技術、組立技術、CAD/CAM/CAE応用技術 生産情報システム技術科:プログラミング技術(C++言語、Visual Basic(R))、計測・制御技術 |
| 課題に取り組む推奨段階 | 応用課程2年 |
| 課題によって養成する知識、技能・技術 | 機械:主に企画・設計、CAD/CAM/CAE技術、機械加工、組立・調整・検査の応用実践力 情報:プログラミング技術、リアルタイムマルチタスク処理技術 |
製作の目的と概要
★技能・技術習得目標:
課題を通して、機械系の学生は各種機械要素、構造材料の使用方法や設計方法を知り、それぞれ適した機械加工法、締結方法などを習得します。また、情報系の学生は機械制御のためのプログラムの在り方を知り、適切なプログラム言語の選択と連携方法を習得します。さらに、企画方法や提案の仕方、報告の仕方、スケジュール管理などを通じてコミュニケーション力を強化します。
成果
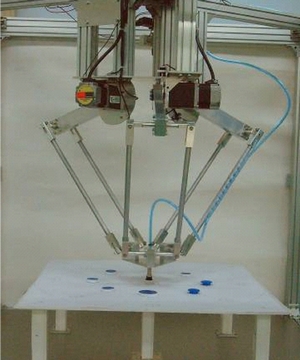
図2に円形のアクリル板をプログラムされたパターンに配置するデモンストレーションを行なっている様子を示します。
★アピールポイント:
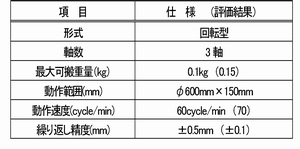
このパラレルリンクロボットの仕様は表1のようになっており、広い動作範囲を持ちながら十分な高速性と高い繰り返し精度を保有していることが分かります。
※この課題情報シートには、学生が作成した予稿原稿が含まれています。