- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
宇宙エレベーター技術競技会用モデルの開発(H24)
| 大学校及び設置科 | 東北職業能力開発大学校 生産システム技術系共同開発 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | CAD設計応用実習、精密加工応用実習、センサ応用技術、電子回路設計製作実習、通信、リアルタイムシステム等 |
| 課題に取り組む推奨段階 | 応用課程2年 |
| 課題によって養成する知識、技能・技術 | 3次元CAD設計、機械加工、センサ、通信、制御、回路設計技術、各種アルゴリズム設計、製品設計製造情報のドキュメント作成及び管理技術 |
製作の目的と概要
★技能・技術習得目標:
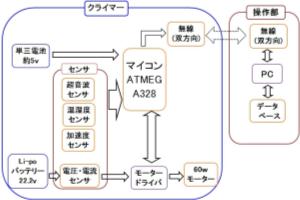
課題を通して、機械学生はロープとローラー間の摩擦力及びモータ容量計算、機構設計・製作手法等、電子学生はセンサ、通信、モータ制御技術、回路設計手法等、情報学生はデータ送受信技術、GUI技術等を習得します。
成果
★アピールポイント:
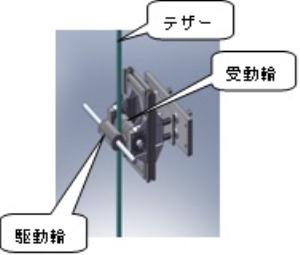
クライマーのテザーを2つのローラーで両側から挟み、ローラーの回転力でテザーを押し下げながら登る機構は、通常のエレベーターの方法とは異なるため、一見の価値があります。