- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
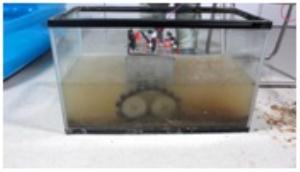
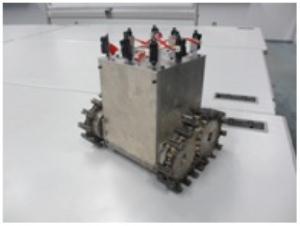
農業支援除草ロボットの開発(H24)
| 大学校及び設置科 | 東北職業能力開発大学校 生産システム技術系共同開発 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | 生産機械システム技術科、生産電子システム技術科、生産情報システム技術科 各系 履修内容のすべて |
| 課題に取り組む推奨段階 | 応用課程2年 |
| 課題によって養成する知識、技能・技術 | 複合した技能・技術及びその活用能力の養成に加えて、ヒューマンスキル・コンセプチュアルスキルの向上をはかる。 |
製作の目的と概要
★技能・技術習得目標:
機械系:水密構造を持つ駆動系、電子系:12時間程度連続動作可能なバッテリー制御を含む電子回路技術、情報系:稲株を傷めず水田全体をもれなく走行する制御アルゴリズムの構築能力(複数台の協調動作も想定した)
成果
★アピールポイント:
実際には、試作機のプロトタイプも製作していますし、駆動系の水密機構部の作り直しも含めれば、1台の試作機を動かすために実質2台分以上を制作したことになります。プラモデルやキットの組立と異なり、同等品の存在しない開発における作業量の多さ、プロジェクト推進のたいへんさを学生に体感してもらうことができます。