- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
軌道計算照準システムの開発(H24)
| 大学校及び設置科 | 東北職業能力開発大学校 生産システム技術系共同開発 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | 精密機器設計、精密加工応用実習、センサ応用技術、電子回路設計製作実習、通信、リアルタイムシステム等 |
| 課題に取り組む推奨段階 | 応用課程2年 |
| 課題によって養成する知識、技能・技術 | 3次元CAD設計、機械加工、センサ、通信、制御、回路設計技術、各種アルゴリズム設計、製品設計製造情報のドキュメント作成及び管理技術 |
製作の目的と概要
このような背景から、高速画像処理技術、高速高精度自動制御技術の基礎技術開発のための教育用システムとして「軌道計算照準システム」を開発することとしました。
★技能・技術習得目標:
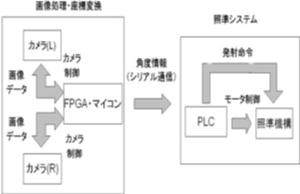
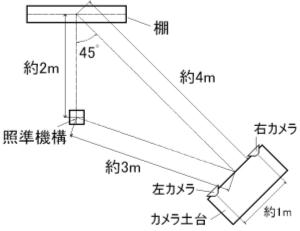
システムは、カメラ(画像取得)部<電子科・機械科担当>、画像処理装置<電子科・情報科担当>、モータ制御装置<電子科・機械科担当>、照準装置<機械科担当>と周辺機器(コンプレッサーなど)で構成されます。
システム開発を通して3D位置検出画像処理と高速駆動システム開発を修得します。
成果
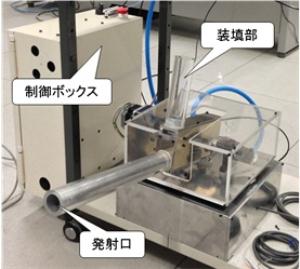
装置と照準システムを開発しました。
FPGA、マイコンを使用することで飛翔物の画像処理を想定した高速画像処理時間の目標を達成できました。
照準時間は飛翔物を想定した目標時間は未達成でしたが原因は判明しており、照準精度は達成したことから飛翔
物に対するシステム開発への移行条件を満足しました。
★アピールポイント:
任意の位置に置いたカラーボール(φ90)に対しては命中率99.9966%です。(外す確率は約1/29,000)
レーザポインタで照準→命中(連続5個まで)の動作は一見の価値あります。