- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
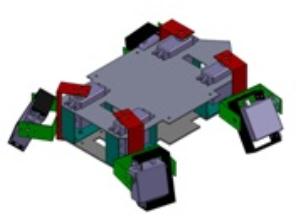
競技用多足歩行型ロボットの製作(H24)
| 大学校及び設置科 | 中国職業能力開発大学校 附属福山職業能力開発短期大学校 制御技術科 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | 機械工作実習、数値制御加工実習、ディジタル回路、マイコン制御実習、制御プログラミング実習、CAD実習?・? |
| 課題に取り組む推奨段階 | 専門課程2年 |
| 課題によって養成する知識、技能・技術 | CAD技術、レーザー加工機、プレスブレーキ、電子回路技術、マイコン制御技術 |
製作の目的と概要
★技能・技術習得目標:
競技用多足歩行型ロボットの製作では、設計、機械加工、組立・調整、プログラムの開発、検査・評価・報告までの「ものづくり」に係る一連の工程を実習を通して習得することで、実務に適応する技能・技術を身に付けます。
成果
★アピールポイント:
中国ブロックポリテックビジョンのロボット競技会に参加しました。2走して、1走目は1分02秒で見事完走しましたが、2走目は障害物のネットでライントレースできなくなり、コースアウトしました。コースを完走するという目標を与えることで、学生たちも興味を持って課題に取り組むことができました。