- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
マイクロマウスの製作と走行制御(H24)
| 大学校及び設置科 | 東北職業能力開発大学校 附属秋田職業能力開発短期大学校 電子情報技術科 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | 電子回路組立技能、センサー技術、プログラミング技術、組込みマイコン技術、モーター制御技術 |
| 課題に取り組む推奨段階 | 専門課程2年 |
| 課題によって養成する知識、技能・技術 | ハードウェアとソフトウェアの関連など、各技術要素の組み合わせと総合的な機能実現の方法 |
製作の目的と概要
★技能・技術習得目標:
電子回路の理解と組立技術を習得します。
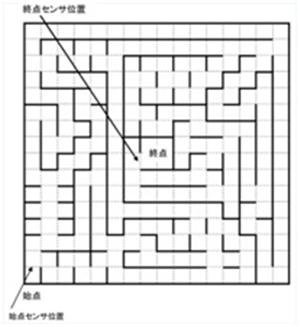
光センサの技術、走行の制御技術、アルゴリズム技術を習得します。
成果
★アピールポイント:
電子情報技術科で習得した技能・技術を総合的に活かすことができます。各種大会も開催されており、参加を目標に学生のモチベーションを高めることができます。大会において高度なロボットを見ることで更なる向上への意欲が湧いてきます。