- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
自律型二足歩行ロボット(H24)
| 大学校及び設置科 | 近畿職業能力開発大学校 制御技術科 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | センサ工学、メカトロニクス工学、電子工学、ディジタル回路、マイコン制御、制御プログラミング、CAD実習?、CAD実習? |
| 課題に取り組む推奨段階 | 専門課程2年 |
| 課題によって養成する知識、技能・技術 | 電子回路を設計及び製作する技術、3次元CADを用いて機器の設計及び動作をシミュレーションする技術 |
製作の目的と概要
★技能・技術習得目標:
○3次元CADで作成し、駆動部が干渉しない様、動作をシミュレーションする技術を習得します。
○3次元CADから2次元CADに変換させて加工図を作成し、加工図を基に機器を作成する技術を習得します。
○平行リンク機構を学び、その動作、特性を理解します。
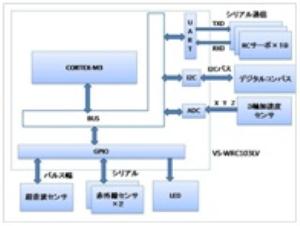
○電源部からセンサ回路、制御部など、電子回路を設計、製作する技術を習得します。
○マイコンよりシリアル通信を行い、シリアルRCサーボモータを制御します。
成果
★アピールポイント:
パソコンからシリアル通信でロボットを動作させるプログラムを作成しました。パソコンのマウス操作(ボタンクリック)で手を振る動作や足をばたつかせることが出来ます。
6人で作業を分担したので、一人ひとり責任を持って作業しました。設計などを含めた全ての作業を学生のみで行ったので、失敗を重ね、解決し、知識や技術深く学ぶことが出来ました。