- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
「走行性を高めたレスキューロボットの開発」(H25)
| 大学校及び設置科 | 東北職業能力開発大学校 生産システム技術系共同開発 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | 生産機械システム技術科、生産電子システム技術科、生産情報システム技術科 各系 履修内容のすべて |
| 課題に取り組む推奨段階 | 応用課程2年 |
| 課題によって養成する知識、技能・技術 | 複合した技能・技術及びその活用能力の養成に加えて、ヒューマンスキル・コンセプチュアルスキルの向上をはかる。 |
製作の目的と概要
★技能・技術習得目標:
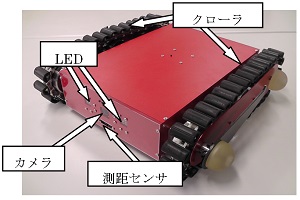
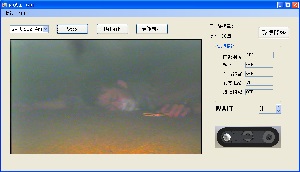
機械系:リフター装備の機体と駆動系の設計・製作・組み立て調整技術、電子系:距離センサ・温度センサを含む電子回路設計と基板製作技術、情報系:リフター動作を含む走行制御アルゴリズムの構築能力とグラフィカルユーザインターフェイス(GUI)構築技術
成果
★アピールポイント:
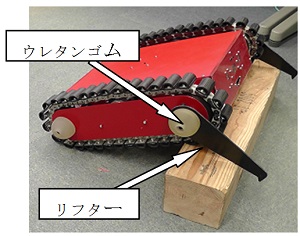
一般大学が開発しているレスキューロボットと比較すると、探索想定場所が床下などに限定されます。しかし、産業用メカトロ二クス部品を多用しているため安価で、初心者でも10分程度の講習で操縦が可能であるなどの特徴を持ちます。また、リフター機構は、世界でこのロボット独自の機構となっています。