- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
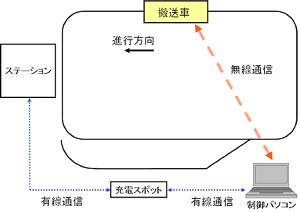
自動搬送車の開発(H25)
| 大学校及び設置科 | 北陸職業能力開発大学校 生産システム技術系共同開発 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | 精密加工技術、CAD/CAM応用技術、センサ技術、インタフェース技術、通信技術、コンピュータ応用技術、創造的開発技法 |
| 課題に取り組む推奨段階 | 応用課程2年 |
| 課題によって養成する知識、技能・技術 | 精密加工応用技術、CAE応用技術、自動化システム設計製作技術、センサ活用技術、マイクロコンピュータ応用技術、モータ制御技術、ネットワークシステム構築技術 |
製作の目的と概要
★技能・技術習得目標:
本課題を通して、「ものづくり」全工程を行うことにより、複合した技能・技術及びその活用能力(応用力、創造的能力、問題解決能力、管理的能力等)を習得することを目的としています。
成果
★アピールポイント:
屋内外での搬送を考え、屋内では光センサと金属製反射板を用いた誘導路を、屋外は電磁誘導型センサと誘導線(交流信号を印可)を敷設した誘導路により走行できます。またコーナーや停止時の減速開始位置については、鉄板を設置し磁気近接センサにより判断しています。