- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
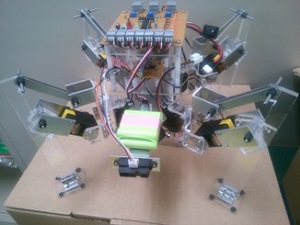
競技用多足歩行ロボットの製作(H25)
| 大学校及び設置科 | 中国職業能力開発大学校 附属福山職業能力開発短期大学校 電子情報技術科 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | アナログ回路実習、ディジタル回路実習、電子回路設計製作実習、組込みソフトウェア応用実習、組込み機器製作実習、プログラミング実習 |
| 課題に取り組む推奨段階 | 専門課程2年 |
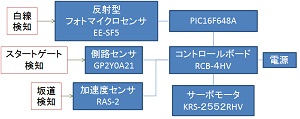
| 課題によって養成する知識、技能・技術 | 組込みプログラミング技術、機械工作技術、基板設計技術、基板製造技術、サーボモーター制御技術、センサー技術、2個のマイコンによる連携制御技術 |
製作の目的と概要
★技能・技術習得目標:
課題を通して、サーボモーターの制御技術、ロボットを制御するためのマイコン組込みプログラミング技術、ロボットを製作する機械加工技術、ラインのトレースや、坂道を検出するセンサー技術を習得します。
成果
★アピールポイント:
多足方向ロボットは4足歩行ロボットを製作し、足の動作はサーボモーターで制御しています。坂道
の状態はセンサーで検出し、制御を変えています。歩行動作に特徴があり、動きで楽しめます。