- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
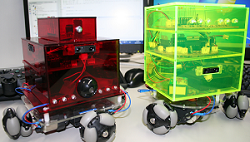
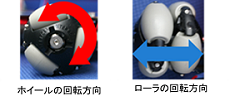
オムニホイール?を用いた全方向移動ロボットの製作(H26)
| 大学校及び設置科 | 近畿職業能力開発大学校 電子情報技術科 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | ディジタル回路技術、マイクロコンピュータ工学実習、組込みソフトウェア基礎実習、組込みシステム工学、電子回路 |
| 課題に取り組む推奨段階 | 専門課程2年 |
| 課題によって養成する知識、技能・技術 | 制御モデル設計技術、モータ制御技術、通信技術、センサ技術、プログラミング技術 |
製作の目的と概要
★技能・技術習得目標:
全方向移動ロボットの製作を通して、ハードウェア、ソフトウェア、無線通信技術の習得を目標としました。車輪の制御方法やBluetooth?モジュールを用いた無線通信、センサ回路・マイコン回路・モータ駆動回路の設計・製作、プログラミング技術と習得する技術は多岐にわたります。また、実習を通してチームワークやコミュニケーション、プレゼンテーションの能力を高めることも目標としています。
成果
★アピールポイント:
距離センサやバッテリチェッカーを実装しており、それらを利用した動きを工夫することができます。これにより、ただ遠隔制御するというだけでなく、障害物回避などのインテリジェントな機能を実現することができます。