- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
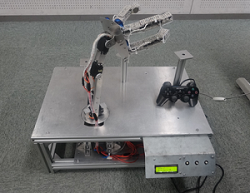
ロボットアームの製作(H26)
| 大学校及び設置科 | 九州職業能力開発大学校 電気エネルギー制御科 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | 機械工学概論(?、?)、機械工作実習、電子回路工学(?、?)、電子CAD実習、インターフェイス技術、センサ工学、情報工学基礎実習、制御プログラミング |
| 課題に取り組む推奨段階 | 専門課程2年 |
| 課題によって養成する知識、技能・技術 | 機械工作技術、電子回路設計技術、マイコン制御技術 |
製作の目的と概要
★技能・技術習得目標:
ロボットアームの製作を通して、設計、製作及び組立・調整技術等の総合的な実践力を身に付けるとともに、電子回路設計技術、マイコン制御技術、金属加工技術も身に付けます。
成果
★アピールポイント:
本製作物は、マイコン制御により動作するロボットアームです。学生に馴染みのある家庭用ゲーム機のコントローラにより操作できるようにしています。関節部はRCサーボモータを使用しています。モータの回転角度の制御は、PWM制御により行っていますので、マイコンのタイマーの取り扱い方を学習することができます。ロボットの各部品は、金属、プラスチックの加工を行い、部品を作成しています。また、電子回路の設計、マイコンプログラミング技術を習得することができます。