- トップ >
- データベース(職業能力開発支援情報) >
- 専門課程・応用課程課題情報検索 >
- 課題情報を検索する >
- 課題の要約
ハンドベル自動演奏のための3次元操作インタフェースの開発(H27)
| 大学校及び設置科 | 近畿職業能力開発大学校 電子情報技術科 |
|---|---|
| 課題実習の前提となる科目または知識、技能・技術 | 組込みオペレーティングシステム、組込みソフトウェア基礎実習、産業用ネットワーク実習、組込みシステム工学、情報通信工学基礎実習、インタフェース技術 |
| 課題に取り組む推奨段階 | 専門課程2年 |
| 課題によって養成する知識、技能・技術 | マルチタスク設計技術、タスク間同期制御技術、UDP/IP通信技術、センサ技術、C++プログラミング技術 |
製作の目的と概要
★技能・技術習得目標:
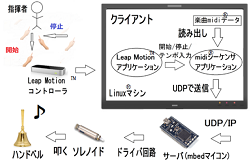
ユーザからのテンポ情報等を取得するタスクとハンドベルに演奏情報を解釈してハンドベルを叩くタイミングを同時にリアルタイム制御するためにはマルチタスクとタスク間同期の技術習得が必須になります。本システムでは最新のマルチコアプロセッサを利用することにより真の並列処理を実現することを目標にしています。実現度合いは実際の演奏デモを聴くことによって主観的な評価が可能です。客観的評価は経過時間取得システムコールにより可能です。また、本課題を通してチームワークやコミュニケーション、プレゼンテーションの能力を高めることも目標としています。
成果
★アピールポイント:
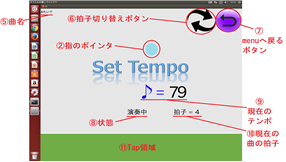
指先の位置情報を非接触に読み取ることによって、ハンドベル自動演奏制御GUIからの曲目選択、曲の開始・終了、テンポのリアルタイム変更が可能なシステムとなりました。最新プロセッサのマルチコア機能とシグナルハンドラによるマルチタスク同期機能をフル活用することによってリアルタイム演奏を行うハンドベル自動演奏システムの開発に成功することができました。