小型ロボツト制御実習用マルチメディア教材
-マルチメディア・ドクターの試作-実践報告◆4
- ポリテクセンター中部(中部職業能力開発促進センター)
- 菊池達也・岩城勇生・小竹昌弘・相澤範幸
1.和の結晶
私たちは小型ロボット制御実習用マルチメディア教材を開発しました。今回,職業訓練教材コンクールにて,優秀な応募作品が多いなか,本教材が入選したことを大変光栄に思います。本教材は,村瀬所長をはじめとする教職員のご指導・支援および教材を利用した受講生からの温かいアドバイスなしには製作できえませんでした。入選はみなさんの和の結晶であることを私たちは深く確信します。誌面をお借りしてお礼申し上げたいと思います。また,今回本教材を「技能と技術」誌に紹介できる機会をいただきまして感謝いたします。
2.開発に至る経緯(2年の歳月)
2.1 セミナーの構築に1年
本教材は当センターで実施している能力開発セミナー「メカトロニクス技術」(24時間)の教材の一部です。メカトロニクス技術は昨年度からFAに従事する技術者を対象に実施を始め,セミナーの構想から教材開発まで2年の歳月を費やしました。
メカトロニクス関連の能力開発セミナーのニーズや重要性は年々増加していく傾向があります。当センターではメカトロニクス関連のセミナー,PC,シーケンス,センサ技術,CAD/CAM,NCプログラム,油空圧制御,産業用ロボット制御技術,そしてパソコン制御等を専門的および段階的なセミナー体系を構築して,職業能力開発を実施しています。
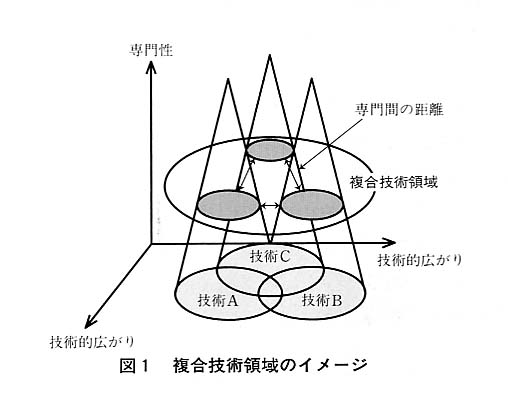
メカトロニクスなどの複合技術は,各要素技術(アクチュエータ,センサ,プログラミング等)がハイレベルな専門領域で水平的に結び合っています(図1参照)。各要素技術は,円錐形をイメージすることができます。専門性が高まるにつれて,専門間の距離は広がる傾向にあります。受講生が現場で役立つ知識・知りたい情報は,各専門分野の接点を含めた複合技術領域です。ロボットやFAシステムを例にあげるまでもなく,断片的な専門知識だけでは設計できません。このようにメカトロニクスを分析した結果,2つの問題を発見しました。
- ① 複合技術領域の各専門性の確保
- ② 複合技術領域の教育方法
第1点目は,複合技術領域の教育の特有の問題です。一人の講師の専門を超える事柄も多く,その構築は容易ではありません。そのため機械系と電気・電子系の講師が構想の段階から共同でセミナー内容を検討しました。
第2点目の問題点は,複合技術領域の教育を具体的にどのように行うかです。メカトロニクス教育に従事する人たちの共通の課題と思います。私たちはこの課題に対して,先行してメカトロニクス教育を実施している訓練施設の見学や報告書の調査,技術セミナーの受講等によってヒントを探すことにしました。これらの調査を通して,セミナーを発展的に構築できると考えたからです。能開大研修研究センター発行のメカトロニクス関連の文献からは,カリキュラム構成を参考にしました。また,メカトロニクス教育を先行して実施している企業内訓練施設では,多くの実習教材を見学しました。調査・研究で得られた1つの答えとしては,複合技術領域の専門性を確保してそれらがつながりのある集合とするには,実践的な実習課題を多く用意し,水平的関連性知識を必要となるように工夫することでした。そして,実習教材が欠かせないものであり,大変重要であることの認識でした。
2.2 教材の開発
前述の調査の結果,大型の実習装置1台より,小型でも1人1台の実習環境を整備したほうが,在職者を対象とした実践的教育では有効であることを知りました。そして,私たちの勉強も含めて,教材の整備と開発を行いました。
実習装置6台を整備し,そのうち1台に視覚センサを取り付けています。各実習装置は4つの機器から構成されています(図2参照)。
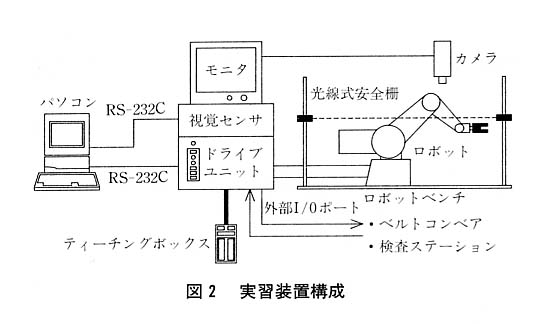
- ①ロボット:卓上に載る小型タイプのロボットを採用しました。5自由度の垂直多関節形であり,ティーチングボックスで教示できるタイプです。小型ながら実機に劣らない仕様となっています。
- ②ロボットベンチ:合板を利用して製作したロボットの作業台です。机上表面を保護するためと,各種実習のために製作しました。ベンチには,ロボットの動作範囲を色分けしており,ピックアンド・プレイス作業用にあらかじめ5つのポイントを記してあります。また,実習中の安全対策として光線式安全柵を備え,センサの取り付けや調整の実習を行っています。
- ③視覚センサ:FAの現場では視覚センサを利用して,人間の目視作業を自動化する傾向にあります。セミナーでは,視覚センサとロボットの協調作業を一例に紹介しています。
- ④パソコン:Windows3.1環境を利用して実習しています。Windowsのメモ帳(エディタ)を利用してロボットのプログラムを記述し,ターミナルでRS-232C通信ケーブルを介してロボットへ送信します。
2.3 マルチメディアへ(さらに1年の歳月)
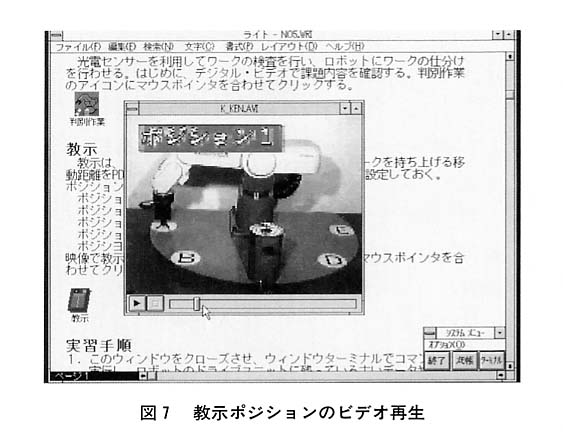
平成5年度からセミナーを実施したところ,いくつかの問題点を発見しました。その1つにロボットの制御実習の進め方がありました。制御実習では,講師が課題の説明とデモンストレーションを行い,実習へ移行します。そのとき,受講生は課題を把握しますが,実習段階で説明を再度求めるケースが多々ありました。ロボットのスライド的動きを長々とテキストで表現することは現実的ではありませんが,受講生の立場で考察すると,授業においてさらに工夫を考えなければなりませんでした。受講生が実習中にもデモンストレーションや教示ポジションを確認できるビデオ教材の必要性を感じ,実習で使用しているコンピュータを単なる制御機能から教具の用途も持たせることを念頭に,ディジタル・ビデオを製作し,各種実習課題をコンピュータに入力しました。
製作にあたり特に配慮した点は,下記の項目です。
(1) 簡単な操作学習
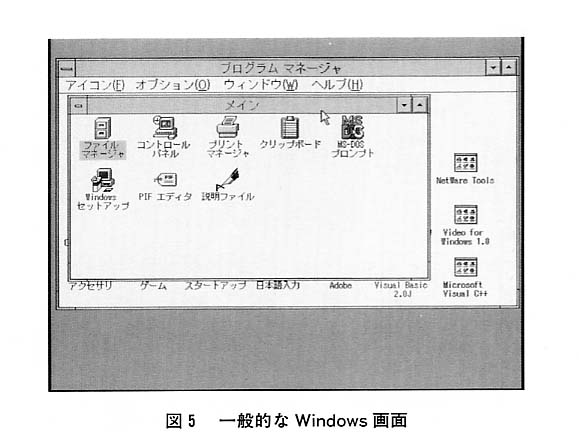
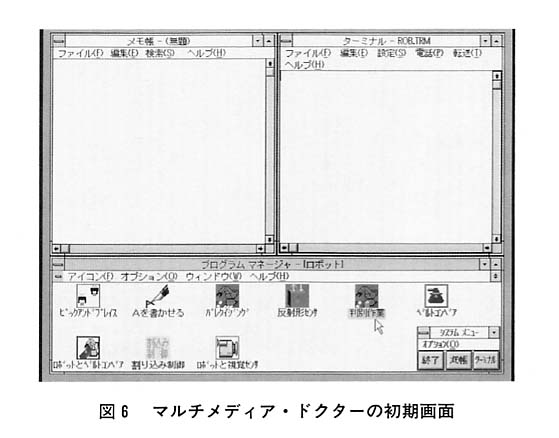
Windowsによるソフト開発には,受講生が簡単に操作学習できることを最優先の事項としました。受講生が操作学習に抵抗を感じたり,余計な時間を費やしたのでは,本来のメカトロニクスの学習意欲を減退させるからです。そのため,一般的なWindowsの立ち上がり画面は図5のようですが,本教材画面では実習で必要なウィンドウのみを見えるようにカスタマイズしました(図6)。画面にはアイコンと呼ばれる各実習課題のシンボルを用意し,マウスを使用して簡単に操作学習できるようにしました。
(2) ビデオ・オン・デマンド(Video on demand)
受講生が手元のコンピュータで必要に応じて何度でもビデオを再生できるようにしました。ディジタル形式がテープ方式より優れている点は,早送り,巻き戻しを瞬時に行えること,動画をきちんと静止できること,そして経時変化による画質の劣化を生じないことにあり,従来のビデオ教材の欠点を克服できたと思います。
実際的方法は,メディアプレーヤーを前面で使用することにより,容易にビデオ再生を実現できました。しかし,通常の使用方法では再生ファイルを呼び出して,再生実行の手続きを行いますが,課題別のアイコンをダブルクリックするだけで簡単にビデオ再生ができるようにWindowsのプログラミングを行いました。
またビデオのディジタル化では,ビデオ情報の増大が問題となりました。一般のビデオ画質は30画面毎秒ですが,ハードディスクにコンパクトに納めるために15画面毎秒(256色)とビデオ情報を少なくしました。それでも約40秒のビデオのディジタル化には約40Mバイトを必要とし,さらに情報を圧縮する方法で約4Mバイトまで切り詰めました。この方法で最低限のビデオ画質を確保することに成功したので,9つのデモンストレーションのビデオを同様な方法でディジタル化しました。
3.使用方法
私たちは,教材にマルチメディア・ドクター(Multimedia-Doctor)の名称をつけました。その使用方法について簡単に説明します。
コンピュータの電源を入れ,Windowsを起動すると図6の初期画面が自動的に表示されます。4つのウィンドウから画面は構成されています。実習に不要なウィンドウやアイコンは画面に見えないようにしてあります。
(1) メモ帳
ロボット制御プログラムを記述するエディタ。
(2) ターミナル
ロボットへ制御プログラムを送信する通信ソフト。
(3) ロボットウィンドウ
アイコンで示した実習課題集。
(4)システムメニュー
Windowsを終了時やメモ帳の起動に使用するメニュー。
3.1 実習手順の確認
ビデオを見るにはロボットウィンドウのアイコンにマウスポインタを合わせてダブルクリックすると,実習課題が画面全体に表示されます(図7参照)。課題説明のアイコンや教示のアイコンをダブルクリックすることにより,それぞれのビデオを再生できます。ビデオウィンドウ下部のポーズボタンやトラックバーの操作により,任意の画面での静止や,早送り,巻き戻しが容易に行えます。
3.2 プログラムの作成と送信
ロボットへの送信では通信ソフトを利用しているため,ロボット言語の記述で制御を行えます。
BASIC環境の場合,PRINT文等の送信文とロボット言語の記述の混在を生じますが,本教材では余計な負担を受講生に与えないように配慮しました(図8)。
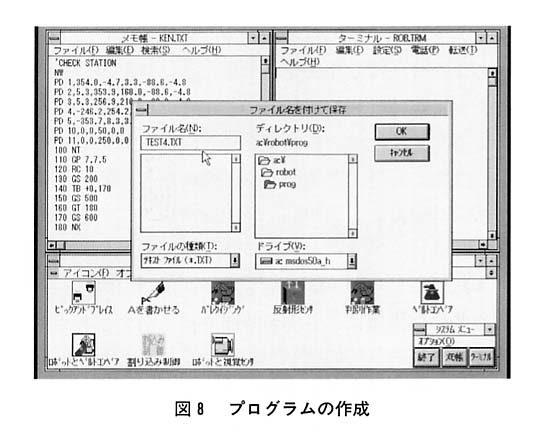
また,制御プログラムの送信には右隣のターミナルを利用します。
3.3 プログラムの実行
ドライブユニットへ送信されたプログラムによりロボットは動き出し,ロボットの動作確認を行います。動作に不具合があるならば,教示データの確認やプログラムの見直しを行い,再実行します。
以上が,本教材を利用した一連の学習手順となります。
4.教材効果とアンケート結果
4.1 教材効果
本教材を活用した能力開発セミナー(在職者の方々を対象)を,94年7月より計5回実施した結果,下記の効果を得ました。
(1) 表現の正確さ
テキストでは表現が困難であったロボットの動作を臨場感あるディジタル・ビデオやサウンドにより詳細な部分まで正確に伝えることができました。
(2) 受動的から機能的セミナーへ
従来の一斉指導されていた受動的な学習形態から,受講生が操作学習する能動的な学習形態へ変化しました。コンピュータを利用した操作学習により,強い関心と興味を持たせ学習意欲を高めました。
(3) 受講生の個性・能力に応じた学習環境
本教材により個々の進度で学習可能なため,一斉指導時の個人差による実習時間を持て余すことや不足する問題をほぼ解消しました。
(4) セミナーの充実
説明の一部をコンピュータに行わせるので,講師の負担が軽減しました。これにより,時間に余裕が生じた講師は,ていねいな説明によりセミナー内容を充実させることができました。
4.2 アンケート結果
受講生に,今回の自作教材についてアンケートの協力をお願いし,貴重な参考意見を得ました。
(1) 操作に関わる質問では(Windowsリテラシ)
本教材はWindowsを利用した設計のため,マウスやウィンドウ等の特徴的な操作があります。今回初めてWindowsを使用する受講生が多く,マウスやウィンドウのオープン,クローズ,スクロールに関して,操作に戸惑ったとの回答がありました。しかし,受講生はすべて技術者や教育関係者であったためコンピュータの使用経験があり,操作の慣れは早かったようです。技術系以外の受講生を対象とする場合,コンピュータの入門セミナーを受講していただいたほうがよいと思われます。
(2) 動画説明
多くの受講生から,ビデオやナレーションによる説明は理解しやすいと回答を得ました。ディジタル・ビデオがテープ方式より優れている点を先ほど述べましたが,2つの欠点もあります。画質の問題と長時間録画に適さないことですが,新しい画像処理技術やコンピュータ周辺機器の低価格化により,このような問題も解決されつつあります。
(3) 教材の全体的評価
マルチメディア・ドクターを利用したセミナーを今後とも受講したいと多くの方に感じてもらえたことは,大きな成果であり励みとなりました。
5.おわりに
マルチメディア・ドクターを実践的に職業能力開発の現場で活用していますが,継続的に改良を加えていくことが今後の課題です。新たにつけ加えたい機能の1つに情報探索機能があります。例えば,メカトロニクスの専門・周辺知識に関して受講生は知りたいことがたくさんあります。知りたい情報を階層的に検索できれば,学習効果もさらに向上すると思われます。
マルチメディアの応用により,今までにない教材や学習形態の開発も期待されます。今回のマルチメディア・ドクターの試作が,各専門分野のマルチメディア教材開発のきっかけとなれば幸いです。