マイコン制御エアアクチュエータの試作について実践報告◆2
- 兵庫県立豊岡高等技術専門学院 三村 孝・藤原芳則
1.はじめに
近年,ME技術の高精度化に伴って,汎用性の高い生産システムおよび高度で総合的な自動化システムなど,FA化の波が産業界に押し寄せてきています。産業用ロボットは,このFA化の進展には欠かすことのできないアイテムの1つであり,発展をより促すために,制御機能のみならずアクチュエータの性能向上の要求が強くなってきました。
現在,ロボットアクチュエータとして広く普及しているのは電気駆動方式です。この方式は速度制御や位置決め制御を容易に行うことができるという効果的な面があります。一方,重量比の割合で比較すると低パワー・低トルクで,かつ柔軟性に欠けるという面もあります。
本稿では,アクチュエータの性能比較という観点から,エア圧を用いたアクチュエータに焦点を当てました。すなわち,エアシリンダは種々あるエアアクチュエータの中で,最も利用度の高い機器です。しかしながら,ロッドストロークなどが制御しがたいという欠点を持っています。
そこで,シリンダピストンの推力とロッドのストロークには,マイクロコンピュータを利用して,容易に制御することのできる簡便なエアシリンダ(以下,多ロッド形エア制御シリンダと呼ぶ)を試作し,実用化への試みを検討しました。その結果を報告します。
2.多ロッド形エア制御シリンダの構造概要
図1は多ロッド形エア制御シリンダのピストン推力を制御する場合の概略構造を示します。
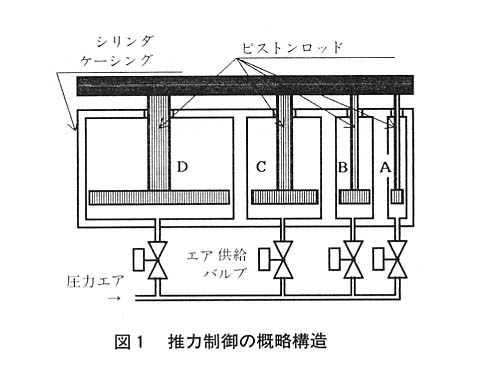
このシリンダはロッドストロークが同一で,ピストンの断面積が1:2:4:8と異なった比例関係にある4つのエアシリンダA・B・C・Dを並列に並べて,それぞれのシリンダケーシング部を固定(一体成形)しています。また,ピストンロッド部についてもロッド先端部を横並びに固定した構造としています。
ピストン推力の制御は,一定圧力エアをシリンダボア内に供給するバルブを,表1に示すように開閉することで,ボア径の違いにより,15段階のデジタル的な推力が得られるようにしています。
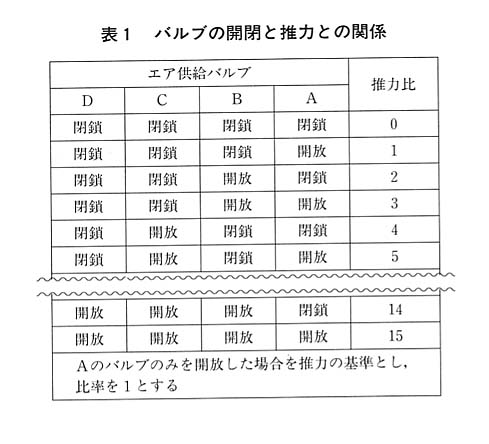
Aのエア供給バルブのみ開放した場合を推力の基準とし,比率を1とすれば,例えば,AとBのバルブのみを開放したときは,推力の比率が基準の3倍となります。
図2は試作した多ロッド形エア制御シリンダのピストン配置形状を示します。
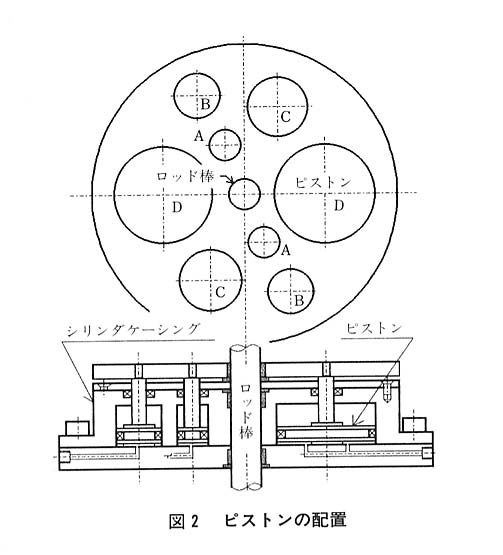
このシリンダは本体部分も軸方向にスライドするため,中央にロッド棒を設け,スライド軸受で支えています。1:2:4:8の比例関係にあるそれぞれのシリンダピストンA・B・C・Dは,断面積を半分に分割し,ロッド棒を基準中心として,前後または左右対称となる位置にそれぞれ配置しています。この配置によって制御時の動作不良,すなわちピストンロッドにかかるモーメントの発生などを抑えています。
図3は多ロッド形エア制御シリンダのストローク制御を行う場合の概略構造を示します。
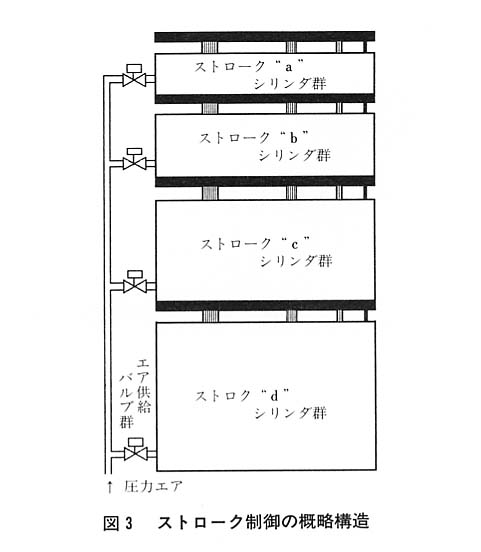
多ロッド形エア制御シリンダは,図1に示すピストン推力を制御する構造体を1つのシリンダ群として,ピストンロッドのストロークが1:2:4:8の比例関係にある4つのシリンダ群“a・b・c・d”を,同一中心線上に順序よく直列に並べて,ケーシング部とピストンロッドの先端部を固定した構造としています。
このシリンダのストローク制御は,表2に示すように,圧力エアを供給するバルブ群の個々のバルブを開閉することによって,ストロークの前進端と後退端との間を15段階の等間隔でデジタル的に得られるようにしています。
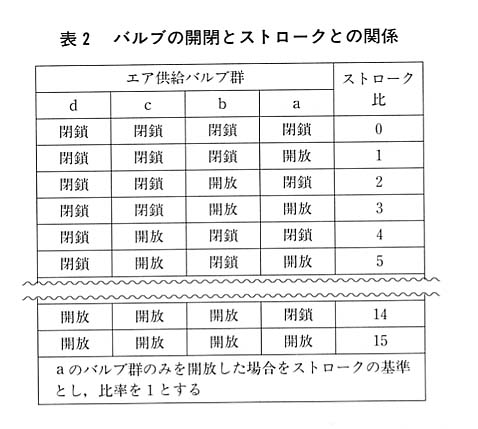
ストローク“a”シリンダ群のエア供給バルブのみ開放した場合をストロークの基準とし,比率を1とすれば,例えば,“a”と“C”のシリンダ群のバルブのみを開放したときは,ストロークの比率が基準の5倍となります。
3.多ロッド形エア制御シリンダの制御
図4は多ロッド形エア制御シリンダを動作させる制御ハードウェアの概略を示します。
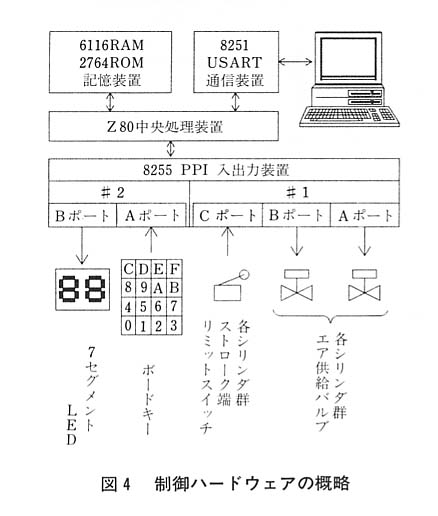
制御を行うコンピュータは,ザイログ社の中央処理装置(Z80CPU)およびインテル社の入出力装置(8255PPI)をもった一般的なマイコンです。
ピストン推力やロッドストロークの動作データは,マイコンの入出力端子に接続されたボードキーによる手動操作,またはRS232C端子接続によるパソコンにより作成します。
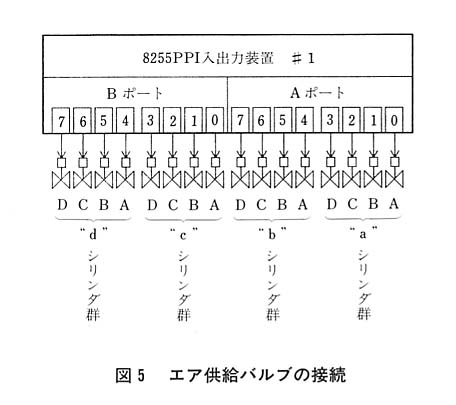
図5は個々のエア供給バルブに対するマイコンへの接続を示します。このマイコンはエア供給バルブを開閉する役割を有しており,8255PPIのAポートの各ビット端子には,ストローク“a”と“b”のシリンダ群のバルブA・B・C・Dを接続しています。またBポートには,ストローク“c”と“d”のシリンダ群のバルブを接続しています。
ピストン推力の制御は,マイコンの出力信号データにより,基準推力を1とした場合,1倍から15倍まで15段階のデジタル的な制御ができます。
また基準ストロークを1とした場合,ストローク制御についても,1倍から15倍まで15段階のデジタル的な制御ができます。したがって,双方合わせて,15段階×15段階=225段階の組み合わせで制御することが可能となります。
今回試作した多ロッド形エア制御シリンダは,基準推力を10N,基準ストロークを5mmに設定しました。すなわち,推力は10Nから150Nまで,ストロークは5mmから75mmまで制御することができます。例えば,ストローク45mmで100Nの推力を得るためには,ストロークは基準の9倍,推力は基準の10倍となるので,エア供給バルブは,“d”と“a”のシリンダ群のDとBのバルブを開放します。そのためのマイコンZ80CPUから8255PPIへ出力するデータは,
Bポートが10100000B
Aポートが00001010B
となります。
図6は多ロッド形エア制御シリンダを動作させるマイコン制御ソフトウェアの概略を示します。
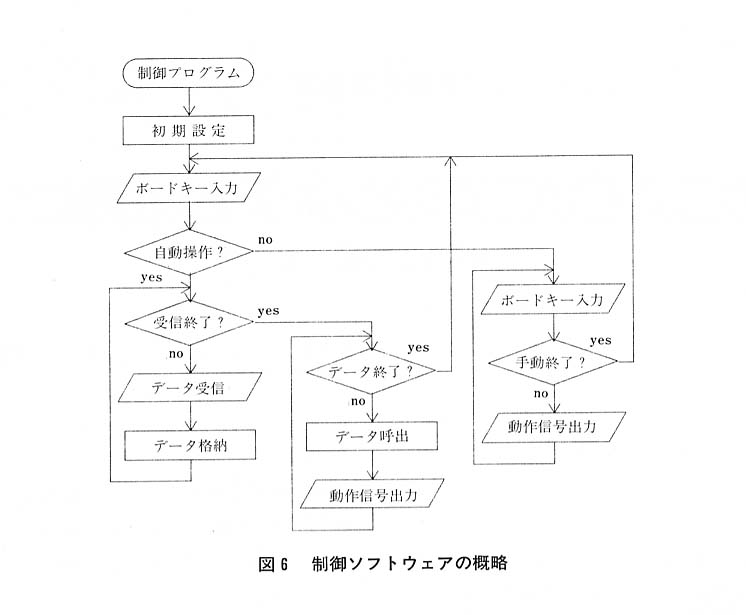
ピストン推力やストロークの個々の動作は,ボードキーで作成した16進数データにより,入力状態に対応した信号がマイコンから出力されます。シリンダ各部を単独で動作させる手動操作のほかに,パソコンを用いて自動操作させる機能もつけています。これは,ボードキーで自動操作に切り替える信号を選択した後に,パソコンでシリンダを動作させる一連のデータを作成し,制御用マイコンに伝送させます。マイコンはパソコンから送られてきたデータをRAMに格納し,その後このデータをピストン推力やストロークを動作させる信号に変換して外部に出力されます。
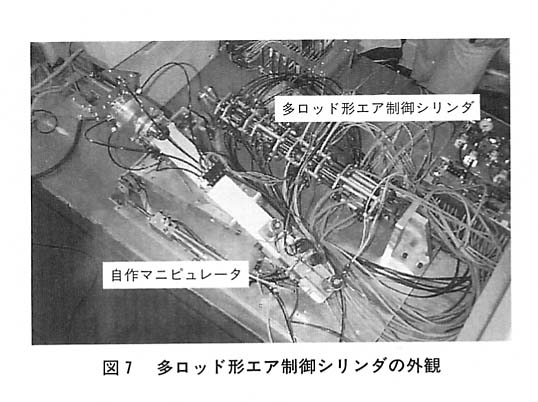
図7は試作した多ロッド形エア制御シリンダをロボットマニピュレータに組み込んだ外観を示します。
4.おわりに
この制御シリンダを試作するに至った動機は,筆者らがコンピュータの教育を通して,2進数の指導の難しさを痛感したことに起因しています。すなわち,2進数の表現をエアシリンダのストロークで視覚的に表そうと考え,実技教育用に製作を思い立ちました。このような考えをもとに製作の着想を進めていましたが,以前よりロボットマニピュレータの制御に関して興味をもっていたこともあり,視覚的表現だけでなくロボットのアクチュエータとして発展させることによって,教育的効果があがるのではないかと考えました。
今回試作した多ロッド形エア制御シリンダを,自作したマニピュレータの関節駆動部に組み込み,コンピュータで制御したところ,16進数データに比例して,ピストン推力およびロッドストロークが,同時に動作できることが確認されました。
今後の展開については,ロボットハンドのアクチュエータとして用いることを考えています。そしてハンド端に圧力センサや滑りセンサなどを取り付けることで,鶏卵や紙コップなど壊れやすい物体を把持させることが容易に行えるようになるのではないかと思います。また,このような柔軟性のあるロボットマニピュレータに限らずメカトロニクス技術を応用した自動化機械の製作は,FA化に対応したメカトロニクスに関する「モノ作り」技術の教育訓練として効果があがるものと確信しています。