ソーラーカーの製作〈その2 電気システムの構成と制御装置の製作〉
―手作りソーラーカーで8時間耐久「ソーラーカーレース鈴鹿 '95」に挑戦―実践報告◆1
- ポリテクカレッジ滋賀(滋賀職業能力開発短期大学校)電子技術科
- 木戸 規雄
1.はじめに
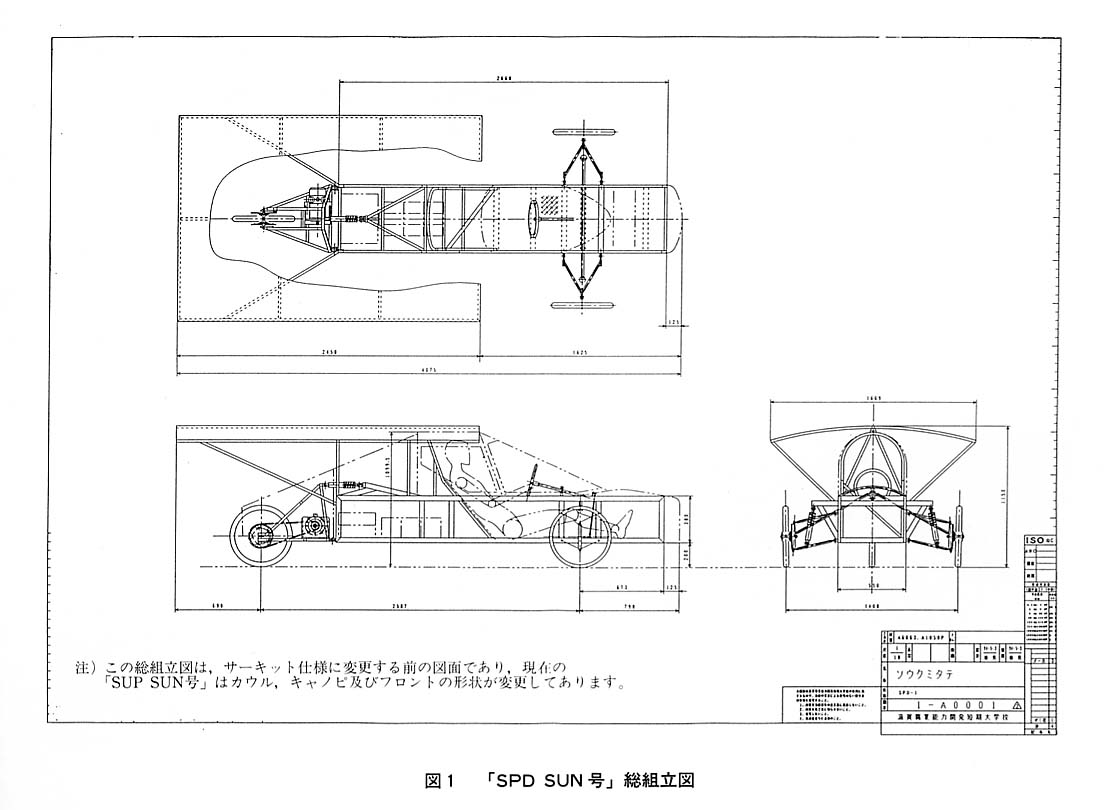
前回では,ソーラーカーの車体の製作というサブタイトルで筆者たちの製作した「SPD SUN号」のフレームやサスペンションそしてブレーキシステム等の設計,製作の概要について述べました。
今回は,太陽電池,制御装置,モータや補助電源である蓄電池から構成される電気システムについて述べます。
とりわけ,ほとんどのソーラーカーチームがメーカ製に依存している制御装置の製作では,開発した装置の原理と動作概要についても述べます。
2.太陽電池と電気システム
図1は「SPD SUN号」の電気システムでもある電装品の系統図です。
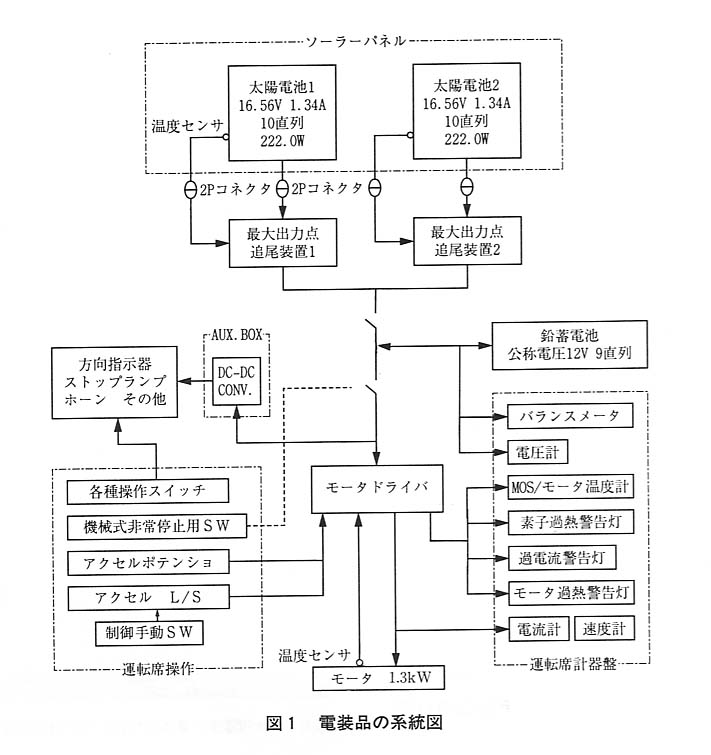
図1の運転席操作スイッチ類と運転席計器盤は,ソーラーカーを安全にかつ的確に走行させるために重要な電装品ですが,それ以上に重要となるのは太陽電池で発電された電力をむだなく負荷に供給するための太陽電池最大出力点追尾装置(以下:MPPT)や,効率よく思うがままにモータを制御することができるモータ速度制御回路(以下:モータドライバ)とモータ,そして蓄電池からなる電気システムです。
システム動作電圧は,使用するモータの定格電圧より100V系とし,制御装置も動作電圧に合わせて開発しました。
2.1 太陽電池とパネル
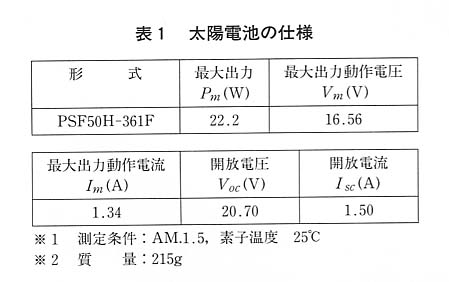
太陽電池は,ソーラーカー用として販売されている表1の仕様の多結晶シリコンのフィルムタイプフレキシブルモジュールを使用しています。
パネルは,アルミ角パイプとアルミ製パンチングメタルを用い,パネル表面は半径4mの2次元曲面とすることで軽量化したパネルの強度を向上させています (その1,総組立図参照)。
太陽電池パネルとは,一般的にパネルにモジュールを複数枚取り付けたものを示します。
通常,太陽電池パネルは太陽電池の架装容量,システム動作電圧,モジュールの仕様等により系統に分割します。しかし,パネル面が曲面の場合には,系統内の各モジュールが持つ法線ベクトルに差ができ,すべてのモジュールから均一な発電電力が得られないという問題が生じます。
つまり,傾きの似通った面にモジュールを配置しないと各モジュールの日射のアンバランスによってその系統内から出力される電流は,発電電力の一番小さなモジュールで制限され発電電力が有効に利用できなくなります。
このため「SPD SUN号」には,パネル形状に合わせて表1のモジュール10枚を直列接続して1系統とし,これを2系統架装することで20枚のモジュールから最大出力電圧165.65V,最大出力電流2.68A,最大出力電力444.4Wを得られるようにしています。
また,各々の系統には次節で述べるMPPTを図1のように配置し,発電電力を有効利用できるようなシステム構成としています。
なお,部分的な遮光から太陽電池を保護するためにバイパスダイオードを各モジュールに逆並列に接続しています。
2.2 MPPT(太陽電池最大出力点追尾装置)
ソーラーカーの電気システムにおいては,トラッカー(Tracker)とも呼ばれている装置で,市販しているメーカは非常に少なく国内外で2社のみがソーラーカーチームに供給しています。
太陽電池の最大出力点とは,太陽電池を電源として使用している状態において,その電源からの出力電流と出力電圧の積が最大になる点で,図2に示すPmです。
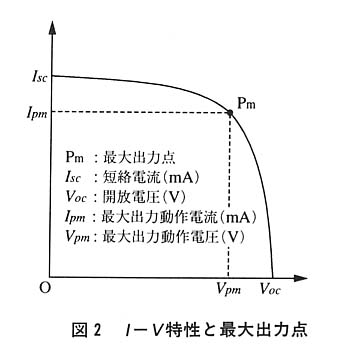
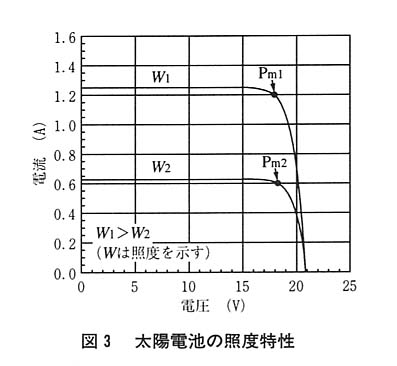
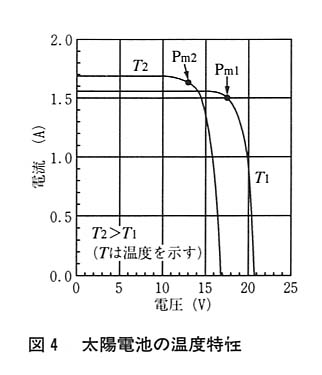
太陽電池の出力特性(I-V特性)は,図3や図4のように照度や温度の変化に依存し,それに伴って最大出力電力(最大出力点)も各々図3や図4のPm1からPm2点に変化します。また,最大出力点は,太陽電池に接続する負荷インピーダンスの大きさや補助電源に用いる蓄電池の電圧によっても変化します。
このような不安定な電源から効率よく発電電力を得るためには,変化する最大出力点を追尾し,使用条件下で発電している最大電力を有効に蓄電池やモータに供給できる太陽電池の制御装置が必要となります。この装置がMPPTです。
以下に,温度および負荷インピーダンスZが一定で照度が低下した場合の例をあげ,最大出力点追尾の原理を述べます。
図5のPm,A点,B点は,動作点でI-V特性と負荷線の交点で示しています。Vop,Vpmは,各々動作電圧とある温度における最大出力動作電圧です。
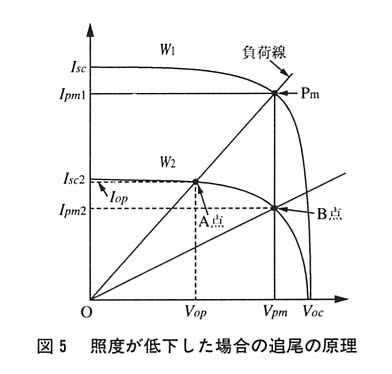
負荷線は,太陽電池の負荷インピーダンスZから求められる傾き1/Zの直線であり,負荷インピーダンスZの大きさにより傾きを変化させることができます。
図5において,W1なる照度を受けて,最大出力点Pmで動作している太陽電池の照度が低下し,I-V特性がW2に変化したとすると,動作点はPmからW2と負荷線との交点であるA点まで移動し,動作電圧は,VpmからVopに変化します。このような場合には,Vpmの垂直延長線とW2の交点である最大出力点B点まで動作点を移動させ,動作電圧Vopを最大出力電圧Vpmと等しくすることで最大電力を得ることができます。つまり,負荷インピーダンスZを大きくし,Vopを照度W2の最大出力電圧Vpmとすることで最大出力点追尾が行えることを示しています。
図5の例の場合には,照度が変化しても太陽電池の温度に対応したVpmとなるように負荷インピーダンスZを変化させて最大出力点の追尾を行ったわけですから,照度が一定で太陽電池の温度が変化した場合においても,太陽電池の温度に応じたVpmとなるように負荷インピーダンスZを変化させれば最大出力点は追尾できます。現実的には,照度の変化,温度の変化,負荷インピーダンスの変化が混在して起こりますが,太陽電池の温度に対応した最大出力電圧Vpmで一定制御すれば最大出力点追尾は可能となります。
「SPD SUN号」に搭載しているMPPTは,太陽電池を定電流源と見なし,メーカの示す太陽電池の温度に対する最大出力電圧Vpmの変化率(0.435%/℃/Cell)に対応した最大出力電圧Vpmを求め,これを一定制御することで最大出力点を追尾する「温度補償による太陽電池の出力電圧一定方式」で開発した装置です。
写真2は,MPPTの外観で表2はその仕様です。

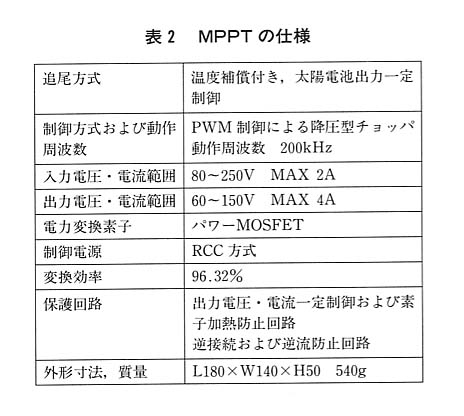
図6は,MPPTの回路構成で,その動作について以下に述べます。
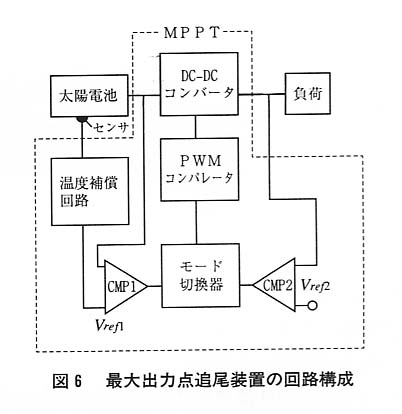
温度補償回路は,太陽電池の温度を検出し,太陽電池の温度に対応した補償電圧Vref1をつくりCMP1に入力します。CMP1は,太陽電池の出力電圧とVref1とを比較し,その差をモード切換器に入力する回路です。
CMP2は,負荷に対する過電圧保護を目的とし,追尾装置の出力電圧一定制御を行わせるための基準電圧Vref2とDC-DCコンバータの出力信号とを比較し,その差をモード切換器に入力する回路です。
モード切換器は,発電システムの状況によりCMP1もしくはCMP2のいずれかからの出力を選択し,PWMコンパレータに入力するように動作します。
PWMコンパレータは,モード切換器で選択された信号でパルス幅変調し,その出力をDC-DCコンバータの制御パルス信号として出力しています。
DC-DCコンバータは,PWMコンパレータからの出力で電力変換素子のオンデューティ比を変化させ,太陽電池からみた負荷インピーダンスZを変化させます。
つまり,太陽電池の温度に対応したVpmとなるように負荷線の傾きを変化させ最大出力点を追尾します。
以上からMPPTは,発電システムの動作状態によって太陽電池の最大出力点追尾を行う入力一定制御(太陽電池からみた場合は出力一定制御)と負荷に対する過電圧保護を目的とした出力一定制御のいずれをもとれるように制御されている直流変換器です。
ソーラーカーに搭載する制御装置は,軽量,小型,高効率に加え耐震性,耐久性,耐熱性が要求されます。このため設計,製作については,電力変換素子利用技術,ノイズ対策,アイートワーク設計,放熱設計,実装技術等を十分考慮して行いました。
特に,炎天下のソーラーカー内部は35℃以上に上昇するため,35℃程度の周囲温度において10時間以上のテストを繰り返し行い,安全性の確認や各種のデータを収集した後,ソーラーカーに搭載しました。
2.3 蓄電池
蓄電池の電圧(直列数)は,モータの定格電圧と太陽電池の出力電圧により決定し,搭載容量は,出場クラスのレギュレーションや太陽電池の発電容量と出場するレースの形態などを勘案して決定するのが正しいと考えています。
「SPD SUN号」には,公称電圧12V,10.2Ah(1h放電率)の開放形鉛蓄電池を10直列接続し,1170kW/hを搭載しています。
2.4 モータとモータドライバ
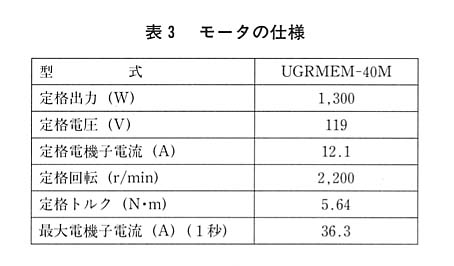
モータは,表3の仕様のDCブラシモータを搭載しています。
ソーラーカーの性能アップのみを求めるのならば,近年,主流となっている高性能のDCブラシレスモータやこれに対応した制御装置を購入すればよいのですが,筆者たちは,開発した制御装置の評価を目的としてレースに参加していることから,最初の取り組みとして制御装置の設計,製作がしやすく高速スイッチング技術の応用が習得できるDCブラシモータを選定しました。
ソーラーカーに搭載したモータには,工業用に用いる場合と異なり,定格電機子電流以上の電流が頻繁に流れモータの温度も上昇します。このことは,効率低下のみならずモータを焼損させる場合もあり放熱には十分な配慮をしています。
写真3は,モータの温度上昇を抑えるために,電力変換素子用の放熱板を加工して本体に取り付けた状態を示しています。また,走行中には空気を取り込み強制空冷も行っています。
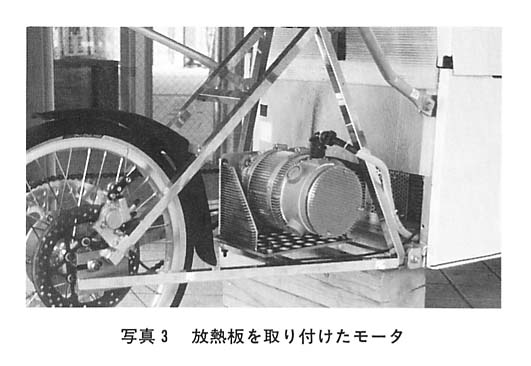
表4は,「SPD SUN号」に搭載しているモータドライバの仕様です。
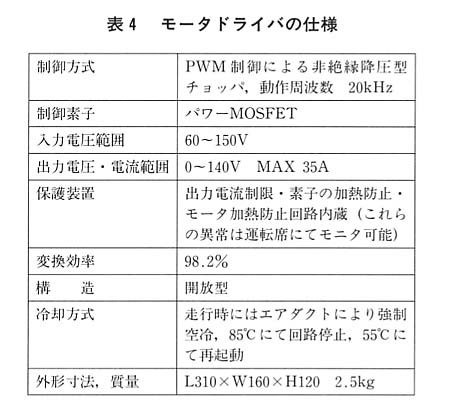
制御方式は,MPPTと同様のPWM方式を用い,電力変換効率の高い非絶縁の降圧型DCチョッパ回路を応用しました。電力変換素子にはパワーMOSFETを用い,キャリア周波数は20kHzとしています。
キャリア周波数はもっと低くてもよいのですが,可聴周波数帯域を避けたいこととMPPTの開発の前段として高速スイッチングのノウハウを習得するために,意識してキャリア周波数を高くして設計しました。
図7は,モータドライバの回路構成です。以下にその動作について述べます。
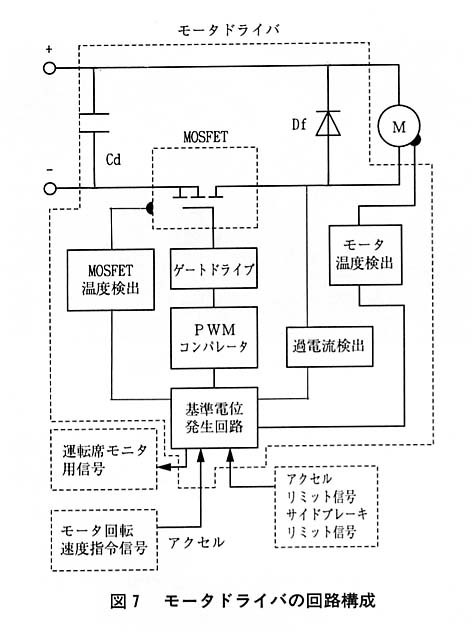
アクセル(モータ回転速度指令信号)から出力された指令電圧信号は、基準電位発生回路を経てPWMコンパレータに入力されます。PWMコンパレータは,基準電位発生回路の出力信号に応じたデューティ比のパルス波を発生し,その出力をゲートドライブ回路に入力します。ゲートドライブ回路の出力は,MOSFETのオンデューティを変化させモータに供給する電力を制御します。つまりアクセルからの指令信号によりモータの回転速度を変化することができます。モータドライバには,モータやモータドライバ自体を保護する目的で保護回路を付加しています。
図7のモータ温度検出回路は,モータ温度が85℃を超えた場合にMOSFETのスイッチングを停止させるような信号を基準電位発生回路に出力し,モータを停止させます。再起動は,30℃のヒステリシスをもたせ55℃で行われるように設計しています。
サイドブレーキ信号は,サイドブレーキを引いた状態での発進を防止するための信号です。
電流検出回路は,モータに対する過電流保護を目的としており,モータの最大電機子電流以上の電流が流れないように垂下特性をもたせた制限を加えています。
MOSFETの温度検出回路は,MOSFETの温度が85℃を超えた場合に制御回路を停止させるような信号を基準電位発生回路に出力します。この場合も30℃のヒステリシスをもたせて再起動を行うよう設計しています。
アクセルリミット信号は,アクセルが踏み込まれているときのみ制御回路が動作するようにしています。
また,図1に示すように保護回路の動作状態は運転席計器盤でモニタできるようにしています。
写真4は,以上のような動作をするように製作したモータドライバの外観です。
この装置の設計,製作はMPPTと同様に行い,耐久試験やデータ収集をした後,搭載しています。
3.電気システムの構成と制御装置の製作のまとめ
その2では,「SPD SUN号」の制御システムの概要と制御装置の設計,製作について述べました。
まとめると以下のようになります。
① 太陽電池パネルは,表1のモジュール20枚を法線ベクトル考慮して10直列の2系統に分割し,各々にMPPTを設置することで発電電力を有効活用できるようにしています。
② 電気システムの動作電圧は,使用するモータの定格電圧に合わせて100V系とし,これに合わせてMPPT,モータドライバを開発しました。
③ MPPTは,温度補償による太陽電池の出力電圧一定制御方式で設計,製作し,変換効率は手作りながら96.3%の高効率を達成しています。
④ モータドライバは,PWM降圧型DCチョッパ方式で設計,製作し,変換効率は98.2%と,MPPTと同様に手作りながら高効率を達成しています。また,安全性,実用性の向上のために各種の保護装置を具備しました。
⑤ 電気システムの動作状態は,運転席の各種計器盤でモニタできるようにし,異常が生じた場合には警告灯で確認できるようなシステム構成としています。
次は,最終回となりますが,「総合組立と評価」というサブタイトルで総合組立において考慮した点やレースに出場するための対策および評価について述べます。
〈参考・引用文献〉
木戸規雄:「太陽電池最大出力点追尾装置の開発」職業能力開発報文誌,第7巻2号,p49.1995.