ソーラーカーの製作〈その3 総合組立と評価〉
-手作りソーラーカーで8時間耐久「ソーラーカーレース鈴鹿'95」に挑戦-実践報告◆1
- ポリテクカレッジ滋賀(滋賀職業能力開発短期大学校)電子技術科 木戸 規雄
1.はじめに
その1,その2では,各々「ソーラーカーの車体の製作」および「電気システムの構成と制御装置の製作」というサブタイトルで「SPD SUN号」の車体や電気システムの設計,製作について述べました。
最終回となる今回は,「総合組立と評価」というサブタイトルで総合組立において考慮した点やレースに出場するための準備と対策および「SPD SUN号」の評価について述べます。
2.総合組立
フレームに制御装置,バッテリ,カウル,キャノピ,太陽電池パネル等を組み付け,ソーラーカーを走行可能な状態に仕上げることが総合組立です。
総合組立の良否は,安全性はもちろんですが車体重量にも大きな影響を及ぼすため,安全性の確保と軽量化の両面から検討を加え組立を行いました。
2.1 コックピット部の組立
コックピットは,ドライバーズシート,計器パネル,アクセルおよびブレーキペダル,ハンドル,サイドブレーキレバー等からなり,これらの配置および取り付けは,ドライバの意見を尊重して行いました。
ドライバーズシートは,発泡ウレタンを用いてドライバの姿勢に合った形状に製作しました。重量は,約1kgと軽量化されています。
ハンドルは,丸アルミパイプを溶接構成して製作したものを使用しています。
アクセルやブレーキに用いるペダルや機構は,製作せず,安全性を優先させて市販されているバイクの部品を流用しています。
サイドブレーキは,小型,軽量化を目的としてアルミ製の自転車変速機のレバーを使用し,後輪に取り付けているディスクブレーキをワイヤで動作させるようにしています。
計器盤の計器の配置については,写真2のようにバッテリ電圧計,バッテリの充放電状態を確認するためのバランンスメータ,スピードメータ(自転車用),方向指示器スイッチ,ホーンスイッチ,各種警告表示灯を優先性に応じてドライバが操作や確認がしやすい位置に取り付けています。
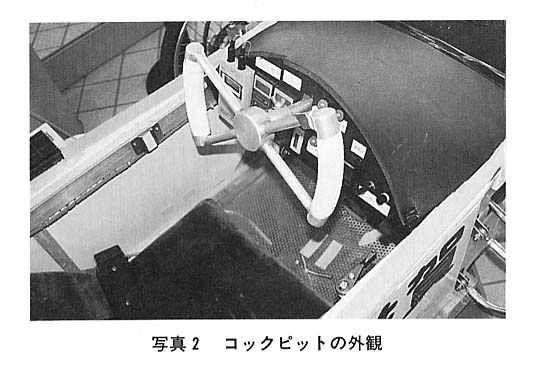
また,「SPD SUN号」にはデータ収集を行う目的で,モータ温度および電力変換素子温度が確認できるように熱電対温度計も具備しました。
2.2 バッテリと制御装置の配置と配線
ドライバと同等の重量であるバッテリの配置は,ソーラーカーの走行性能に大きな影響を与えます。また,後輪1輪の分担荷重が増加した場合には走行中のバーストも危惧されます。
筆者たちが収集した資料では,3輪等荷重が理想であるようですが,「SPD SUN号」では,スラローム走行等の試走を繰り返し行いながら,バッテリの搭載可能な範囲の中で最も安定した走行が得られた位置に決定しました。その結果,各車輪の分担重量は,体重70kgのドライバが乗車した状態で,前2輪に各々67kg,後輪には86kgが加わるような重量配分となりました。
制御装置の配置で重要となるのは,メンテナンス性と配線経路を考慮した取り付け位置の決定です。配線経路が長くなると抵抗は増し,配線材の重量も無視できないくらい増加します。このため,両者を勘案した位置に搭載しています。
2.3 太陽電池パネルの組立
パネルについては,その2(2.1 太陽電池とパネル)ですでに紹介しましたので,補足としてMPPTに使用する太陽電池の温度検出用サーミスタ(センサ)の取り付け位置の決定について述べます。
温度補償による太陽電池の出力電圧一定制御方式のMPPTは,パネルの表面温度が均一であることを前提とした追尾方式です。しかし,ソーラーカーが走行している場合には,パネル表面の空気の流れに乱れが生じ温度分布が均一にならない場合があります。このことは,太陽電池の表面に温度差を生じ,センサを用いて温度補償したVpmと実際に出力されるパネル(系統)のVpmとが異なることを意味します。特に,パネルの温度分布に大きな差が生じた場合にはMPPTの有効性は発揮できなくなります。
筆者たちは,モジュールを10枚直列に接続したI-V特性を作成し,温度が最も高くなるモジュールにセンサを取り付けた場合と,温度が最も低いモジュールに取り付けた場合のVpmと動作点および出力電力との関係を図式より求め,温度分布に差が生じても出力電力に大きな影響を受けないように最も温度の高くなるモジュールにセンサを取り付けています。
このモジュールは,赤外線放射温度計を用いた温度分布の測定結果より選定しました。
また,パネルにウイングを取り付け,走行時におけるパネル表面上の空気の流れを一様にすることで温度分布が均一になるような試みも行っています。
2.4 キャノビとカウルの取り付け
カウルは,メンテナンス性を重視し,マジックテープを用いてフレームに固定しています。
キャノビの取り付けは,非常事態の脱出を考慮しはめ込み式としています。この方式は,ドライバが内側からキャノビを押し上げるだけで取り外すことができ,安全性に優れていると考えています。
3.レースに出場するための準備と対策
レースに出場するための対策としては,出場するレースのレギュレーションに合わせたソーラーカーに仕上げなければなりません。また,ソーラーカーレース鈴鹿の場合では,ドライバは国際C級ライセンス(ソーラーカー限定)を,エントラントは,国際エントラントライセンスを各々取得しなければ出場できません。
雨天に対する準備や対策は忘れがちですが,ソーラーカーレースは雨天でも開催される場合があり,特に,電気系統は安全性の向上とトラブル防止のため十分な対策をとる必要があります。
以下に,筆者たちがソーラーカーレース鈴鹿に向けて行った主な準備と対策について述べます。
3.1 バッテリ容量の算出
バッテリは,補助電源として用いることから,長時間レースではレギュレーションで規定されている最大容量を搭載するのが有利であるとする考え方や,ソーラーカーの性能や競技内容また運営方法に応じた容量を搭載するほうがソーラーカーに負担をかけず良いとする考え方があり,バッテリ容量の算出には苦慮しているところです。
図1は,バッテリ初期容量値を1kWhと仮定し,タイムスケジュール,架装している太陽電池,充電時間とバッテリの充電効率,「SPD SUN号」の走行性能等々から概算(かなり大ざっぱなもの)して,ソーラーカーレース鈴鹿用のバッテリ容量の算出を試みたものです。また,条件としてレース当日は晴天とし,平均時速35km/hで1時間走行するために必要なバッテリからの出力電力を約0.3kWhとみなして求めています。
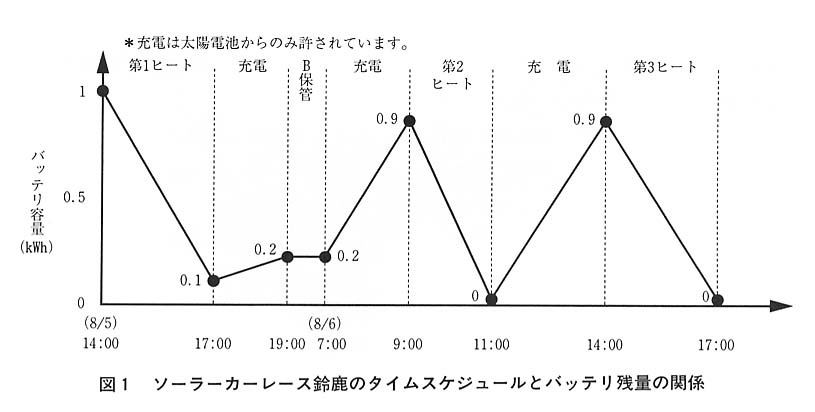
バッテリからの出力電力とは,太陽電池の発電電力のみでは十分な駆動力を得られない場合にバッテリから補助する電力を指しており,この値はメーカの資料や過去のレースのデータおよび鈴鹿サーキットのコースより算出したものです。
この結果から筆者たちは,1kWhのバッテリ容量が平均速度35km/h(筆者たちの目標である48周するための平均速度)で8時間走行するために必要な最少バッテリ容量と推測し,制御システムの動作電圧と入手済みのバッテリの仕様を考慮した容量に若干の余裕を加えた1.17kWhを搭載することとしました。
3.2 バッテリ残量の把握
高速耐久レースや長時間のラリーではバッテリの残量を把握することがレースを展開するうえで非常に重要となります。このため,多くのチームはソーラーカーにバッテリ残量計を搭載しています。
筆者たちは,残量計を開発中でしたがレースまでに完成できず,ソーラーカーレース鈴鹿用として図2に示す「バッテリ電圧-バッテリ残容量特性」なるものを作成しました。
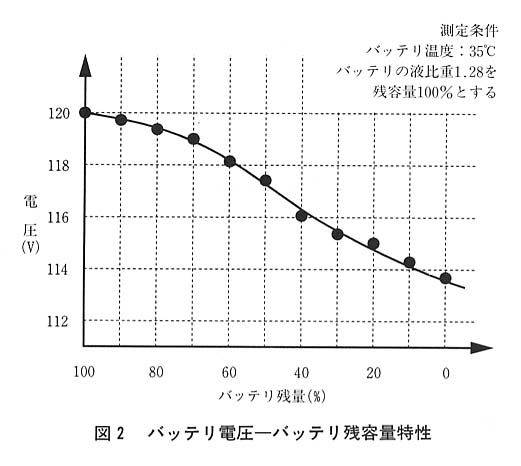
バッテリ端子電圧は,放電率により異なるため電圧から残容量を把握することはできませんから,あくまでも予測できるかを試みたものです。
この特性は,1時間放電率の電流×平均電圧で求められている0.3kWh(前節で概算した値)を,3時間放電率の電流×平均電圧に置換し,これより算出した約5Ahが35km/hの平均速度を得るための電流とみなしています。つまり,決勝の第1・3ヒートが3時間で行われるため3時間放電率に置き換えたわけです。
特性を作成するためのデータは,使用するバッテリを5Aで放電させたときの電圧と比重の関係およびメーカが示す放電深度と比重の関係を用いています。
バッテリ液の比重の測定は,温度補正ができ高精度で値が読み取れるバッテリ・クーラントテスタを用いました。
3.3 スプロケット比(減速比)の選定
減速比は,最高速度,登坂能力,消費電力に大きな影響を与えます。そのためレース内容やコースに合わせた選択をしなければなりません。
表1は,「SPD SUN号」用に準備したスプロケットの減速比です。
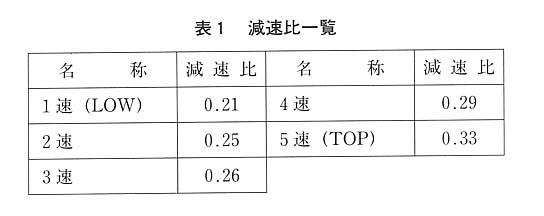
図3は,ソーラーカーレース鈴鹿用の減速比を選定するために作成した「SPD SUN号」の走行性能曲線です。この走行性能曲線は,表2の条件をもとに,表1の減速比と速度をパラメータにして,転がり抵抗,空気抵抗,勾配抵抗を算出し,モータの駆動力と速度の関係およびモータのT-N特性から読み取った回転数とトルクの関係等を用いて作成しています。
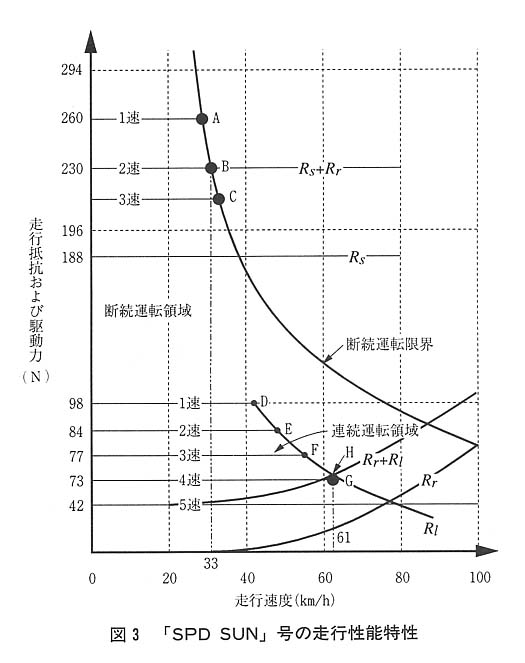
図3のRr,Rl,Rs,,Rr+Rl,Rs+Rrは,各々転がり抵抗,空気抵抗,8%の勾配抵抗,平坦路を走行する場合の全抵抗,8%の勾配を走行する場合の全抵抗(登坂速度は,低速であるためRlについては考慮しない)を示しています。
連続運転領域は,モータに無理(メーカが推奨する以外の使い方)をかけずに連続運転できる領域を示し,連続運転限界はその最大値を示しています。
この領域は,平坦路を走行する場合の減速比の選定に用いることができます。
断続運転領域は,オン(過負荷)およびオフ(軽負荷)を繰り返しながら運転しなければならない領域で,断続運転限界はその最大値を示します。この領域は,モータに無理をかけずに登り坂を走行する場合の減速比の選定に用います。
例えば,図3のRr+Rlと駆動力73Nとの交点Hは,約61km/hとなっています。この値は,平坦路において走行できる「SPD SUN号」の最高巡航速度を示しています。しかし,鈴鹿サーキットの場合では,8%の勾配が約300mも続く逆バンクがあり,平坦路における減速比の選定より,むしろ,この逆バンクをモータに無理をかけることなく登坂できる減速比を選定することが重要となります。このことから,筆者たちは,図3を用いて8%の勾配に対応した減速比の選定を行いました。
「SPD SUN号」が勾配を登るためには,転がり抵抗と勾配抵抗を加えた全抵抗(Rs+Rr)を上回る駆動力が必要となります。つまり,全抵抗値である230Nよりも大きな駆動力が得られる減速比を用いなければ登坂できません。またモータに無理をかけないためには,図3の断続運転領域内でモータを使用しなければならず,減速比は,表1の1速もしくは2速が必要となります。
例えば,2速を選定したとすれば,2速で得られる駆動力(230N)と断続運転限界線との交点Bから求められる33km/hがモータに無理をかけることなく登坂が可能な最高速度になります。
しかし,この結果をそのまま用いることはできません。なぜならば,断続運転領域におけるオンおよびオフの繰り返し時間は,モータの過負荷デューティ特性で規定されるからです。そこで,300mの登り坂を33km/hで通過に要する時間と230Nの駆動力を得るための電流を求め,その結果と過負荷デューティ特性とを用いて,2速で登坂する場合のモータにかかる負担について検討しました。
その結果は,1.5分間オン,6.6分オフ(ここでは連続運転領域に戻すこと)のデューティを維持すれば,周回を重ねても温度上昇による問題がないと確認できました。また図3からも推測できるように2速より減速比が大きい1速も使用が可能です。
4.評価
評価については,制御装置とレースにおける「SPD SUN号」の総合的な評価について述べます。
4.1 制御回路の評価
- (1)MPPTについては,「その2」で述べたように実験室において十分な試験と評価を行った後に搭載しています。現在,200時間以上の動作をさせていますが何ら問題はありません。
- (2)モータドライバについては,実際に搭載した状態での評価が重要となります。とりわけ,モータとモータドライバの温度上昇については,冷却用エアーダクトの取り付け位置の良否も含めた評価および検討が必要です。
図4は,その一例で,登坂走行におけるモータとモータドライバに用いているパワーMOSFETの温度上昇を示しています。
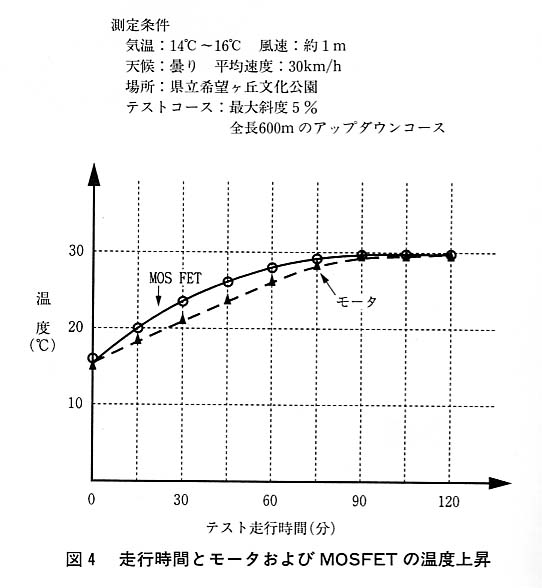
図3からわかるように,気温との差であるΔTはともに約15℃となっています。これより,鈴鹿サーキットの気温が仮に35℃であったとしても温度上昇は50℃程度に抑えられ,問題が生じないことを推測しました。
鈴鹿では,気温34℃においてモータ,モータドライバともに約55℃(走行時)で安定した動作が得られました。
4.2 「SPD SUN号」の総合評価
(1)減速比の選定については,フリー走行で好タイムを出すことのできた2速を予選に用いました。
予選では,1ラップ6分29秒(平均54.2km/h)の好タイムを出し,クラス2位で通過,決勝に進出しました。また決勝は,速度より省エネルギー走行を優先させ,登坂時における消費電流が少ない1速を用いました。
(2)バッテリの搭載容量については,バッテリ電圧の設定を誤ったため,期待した充電電流が得られないという問題が発生しました。
つまり,MPPTの出力電圧とバッテリ電圧の電位差が小さいことから電圧,電流変換を行うMPPTの有効性が発揮できず,結果的には,試算値の約80%程度の充電容量しか得られていなかったようです。このため,決勝第3ヒートにおいてコース上で停車して約45分の充電を余儀なくされました。
しかし,仕様の異なるバッテリに変更することで容易に解決できると考えています。
(3)バッテリの残容量の予測については,メインスタンド前のストレートを放電電流が5Aとなるような速度で走行し,そのときの電圧値と図2の特性から残量を求め,ドライバに指示を与えています。
この特性は,レース後のデータから推測すると約±5%程度の精度で残量を確認できていたようです。
例えば第3ヒートでの停車充電についても残量が約10%であることが予測できたことで,コース上の日射条件の良い場所が選択ができたと考えています。
(4)フレームやサスペンション等の評価ですが,「SPD SUN号」は,現在までに約500kmを走行しています。
この間,4回のレースやラリーに出場していますが,パンク等も含め一切のトラブルもありません。
残念ながら目標より8周少ない40周という結果でしたが「手作り制御装置を搭載したソーラーカーで鈴鹿を完走したい」という筆者たちの大きな夢を達成することができました。また,初出場ながらクラス4位という好成績も収めることができました。
このことは,ミニソーラーカーの開発で得た技術や収集したデータを参考にして,基本に忠実にかつ,各自が最後まで目標を失わず努力した成果であると考えています。
5.おわりに
筆者たちは,制御装置の開発からソーラーカーの製作に取り組み,競技大会で好成績を上げている学生チームとして注目され,多くのマスコミで取り上げられました。
また,MPPTについては,県内外の学生チームや企業チームからの技術支援の依頼があり,学生たちはこれを励みに卒業研究の課題として,また実践技術の応用として新制御装置の開発を含めたソーラーカー製作に取り組んでいます。
真夏の強烈な日差しが西に傾き始めた頃,ノントラブルで8時間(実走距離約232km)を走り抜いた「SPD SUN号」が,憧れのチェッカーを受けたときの感激は,今では学生たちの心の中で大きな自信へと変わっています。
そして,それ以上にソーラーカーレース鈴鹿は,学生たちに新たな目標と新制御回路開発の意欲を与える場になったことと確信しています。
最後になりましたが,本短大の職員の皆様方並びにご支援ご協力頂いた各企業の皆様に心から感謝いたします。
〈参考・引用文献〉
城上 保,他:「作ってみようソーラーカー」,pp.36-50,パワー社.