構造最適設計に関する教育用ソフトウェアの試作■技術情報
- ポリテクカレッジ北海道(北海道職業能力開発短期大学校)寺島 周平
1.はじめに
計算機能力の飛躍的な向上を背景として,有限要素法を中心とした汎用CAEシステムに設計最適化の機能が備えられるようになってきた。最適設計では要求仕様から最適な設計案を導くことができるため,設計者の直感と経験が頼りであった分野の設計プロセスを大幅に効率化することができる。
これまで設計実務者が最適設計手法を習得するためには,市販の汎用CAEソフトウェアを用いることが多かった。このようなアプローチを選択することは,設計者にとって時間的な制約があり,現実的ではない。もし広く普及しているパーソナルコンピュータ上で実行できるような小規模で親しみやすい最適設計プログラムがあれば,構造最適化のアウトラインを効率よく習得することができる。このような分野における教育用プログラムの試作はこれまであまり例がないため,教材開発として意義があると考えられる。
本報告では最初に最適設計の基礎用語を簡単に解説し,試作した教育用プログラムについて紹介する。このプログラムは,応力と変位制約条件のもとで断面積を設計変数としてトラス構造の重量を最小化することができる。プログラムは,Fortran77で記述されているため,卒業研究などで専用プログラムを開発するに当たってのひな型として利用することも可能である。
2.最適設計の概要
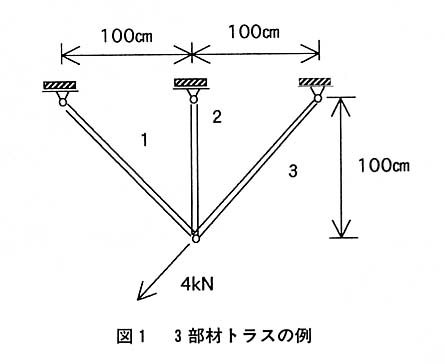
構造システムを定義づけるとき,自動設計の段階で一定値として取り扱われる量を定数パラメータといい,定数として決められない量を設計変数という。トラスやフレームの設計問題では,設計変数として部材断面積や曲げ部材の断面2次モーメントなどが設計変数の例である。設計変数は最適設計問題においては独立変数であり,その値が何らかの方法で決定されれば,構造は完全に定まり,その挙動は有限要素法などの数値解析によって計算される。構造の挙動は構造解析により得られる応力や変位,部材内力などの状態量とする。ここで,設計変数の説明をするために図1に示す3部材トラスを考える。定数パラメータは材料に関する定数(弾性係数,単位体積重量,降伏応力など),部材の配置および形状を表す節点の座標である。設計変数は部材の断面積b1,b2,b3である。
設計において満足すべき制限を制約条件という。特に構造物の挙動に関する制約条件を挙動制約条件という。この挙動制約条件の例として最大応力,最大変位,座屈に関する制限がある。また設計変数の許容範囲を制限する制約条件を上下限制約条件という。
制約条件を満足する設計は無限に存在するが,その中から最良の設計案を決定するためには,それらの案を比較するための1つの関数を作成する必要がある。目的関数(コスト関数,評価関数ともいう)はこのために導入された関数であり,最適設計の目的はその関数の最小値を求めることである。目的関数の選択は設計問題を定義する場合に最も重要な意思決定の1つである。例えば,構造物の製作費がその重量に比例するものとすれば,目的関数として構造物の重量を用いることができる。構造物の重量は容易に数式化ができるので,これが最もよく目的関数として用いられている。
図1に示す3部材トラスの設計問題の例を考え,定数パラメータとして次の値を用いる。
外荷重 4kN
ヤング率 E=207GPa
密度 γ=7.9×10-3kg/m3
許容応力
引張(上限) σU=0.14GPa
圧縮(下限) σL=-1.0GPa
断面積の下限値 bL=0.01c㎡
断面積の上限値 bU=100.0c㎡
部材1,2,3の応力をσ1,σ2,σ3で表すと,この問題の挙動制約条件には次のものが含まれる。
・挙動制約条件
-1.0×109≦σ1≦0.14×109
-1.0×109≦σ2≦0.14×109 (1)
-1.O×109≦σ3≦0.14×109
・上下限制約条件
0.01≦b1≦100.0
0.01≦b2≦100.0 (2)
0.01≦b3≦100.0
部材1,2,3の長さをL1,L2,L3とするとき,図1に示すトラス部材の例題で,設計変数ベクトルをb,目的関数をf(b)として構造の総重量を考えると,次の線形式を得る。
f(b)=γ(b1L1+b2L2+b3L3) (3)
構造最適化問題は,設計変数と構造物の挙動に関する制約条件のもとで,目的関数を最小とする設計変数を決定することである。最適設計問題は数学的に次の条件を満足する設計変数ベクトルbを決定する問題として定式化することができる。
Minimize f(b)
Subject to gj(b)≦0 j=1,m
bL≦b≦bU (4)
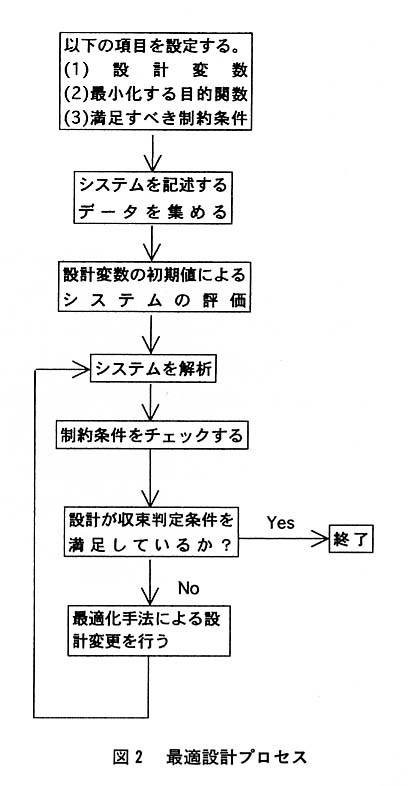
ここで,設計変数ベクトルbの上下隈をbU,bL,目的関数をf(b),j番目の挙動制約条件をgj(b)とする。(4)式は数理計画法の問題と同一の形式になっている。まとめとして,最適設計プロセスの流れを図2に示す。
3.プログラムの説明
プログラムは,MS-DOS上で運用することができ,有限要素法による線形構造静解析,構造感度解析(設計変数をわずかに変更したときの変位,応力を予測する)を実行して,応力,変位制約条件のもとで,トラス構造の重量最小化設計を行うことができる。図3にプログラムのフローチャートを示す。プログラムは有限要素法による構造解析モジュール,変位,設計変数の変化による変位,応力の構造応答を出力する感度解析モジュール,および最適化問題の定式化を行う最適化モジュールに分割されている。プログラムのモジュール化は,複雑化した処理を合理化しようとする1つの試みであり,これまで研究室レベルで書かれた最適化プログラムにはみられないものである。
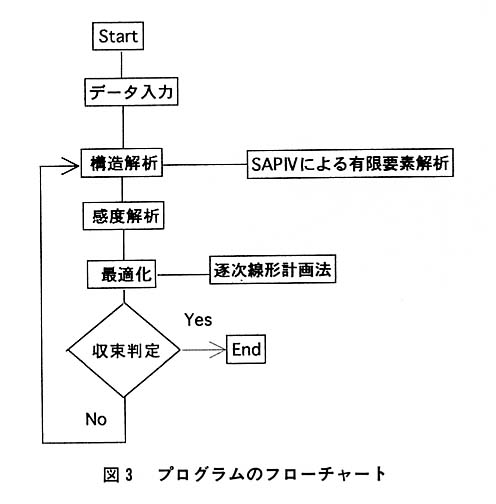
有限要素法による構造解析は,汎用有限要素法プログラムSAP IVをブラックボックスとして利用した。SAP IVのような既存のツールを使って全体のシステムを構成することにより,プログラムの信頼性を向上させることができる。
非線形計画法には,目的関数,制約条件を現在の設計点のまわりでTaylor展開した近似LP問題を,設計変数の変域を制限する移動制約条件を付加して反復する逐次線形計画法を用いている。
プログラムには設計変数および挙動制約条件のグループ化,アクティブな挙動制約条件の選択機能を付加し,設計変数と制約条件式の総数を減少させることを図っている。また,設計変数の逆変数の取り扱いを導入することにより,挙動制約条件の線形近似による可能領域からの逸脱を防ぐことができた。
4.プログラムの実行例
4.1 3部材平面トラス
図1に示す3部材トラスの問題をプログラムを用いて計算する。最初に適当なエディタを用いて図4に示す入力データをアスキーファイル形式で作成する。この入力データファイル名をbar3とし,最適設計プログラムの実行形式をtruss.exeとしておく。MS-DOSのコマンドラインから,
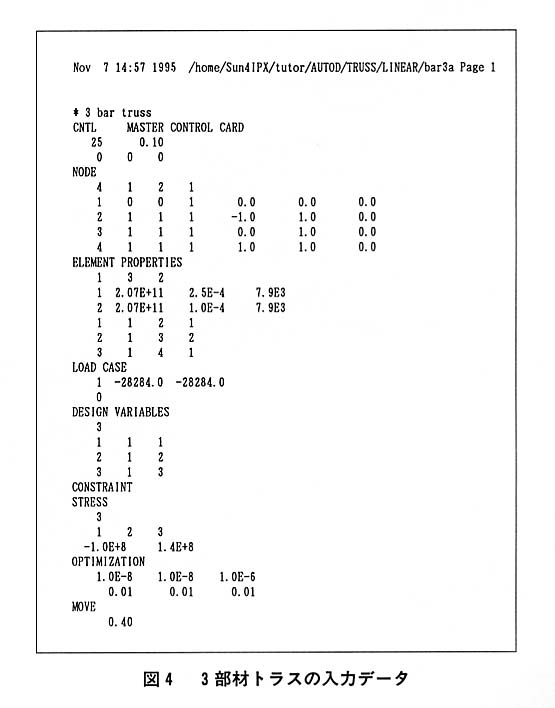
truss < bar3
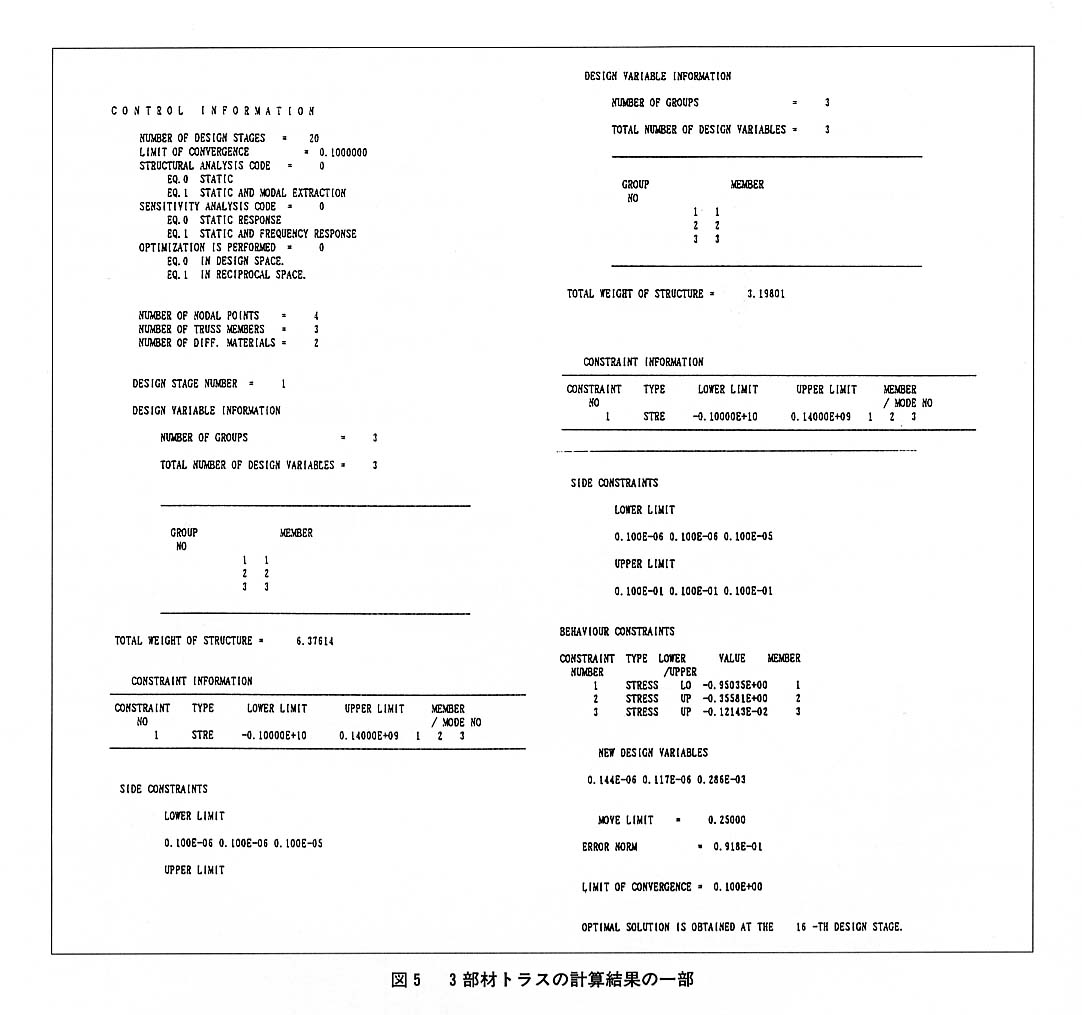
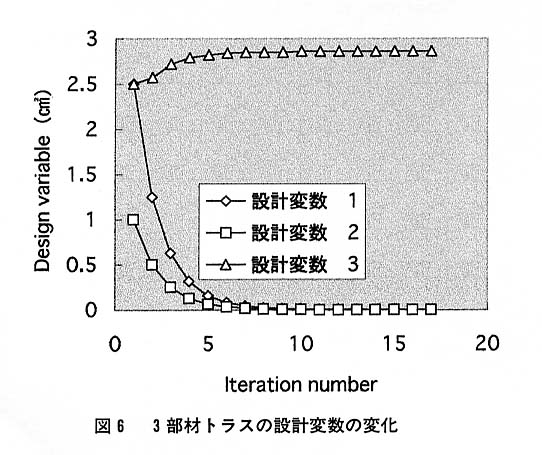
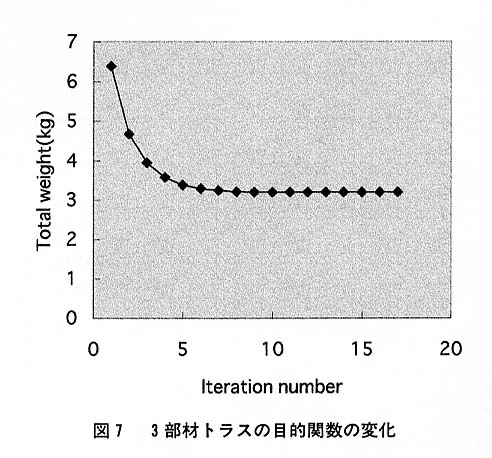
のように入力する。図5に出力結果の一部を示す。設計変数を部材番号(1)から(3)の断面積として選択し,部材(2)の初期値を1.0c㎡,それ以外の部材の初期値を2.0c㎡とする。ヤング率E=207GPa,密度γ=7.9×10-3kg/m3とする。応力の上下限値はすべての部材について,それぞれ0.14GPa,-1.0GPaとする。また,すべての設計変数の上下限を0.01c㎡,100.0c㎡であると仮定する。図6は横軸に設計段階を,縦軸に部材断面積をとり,設計変数の履歴を示す。図7には目的関数の履歴を示した。最適解では,部材(3)の応力制約条件が引張応力としてアクティブになる。現在のプログラムでは部材(1)(2)は,剛性の維持に寄与しないことになる。
4.2 5部材平面トラス
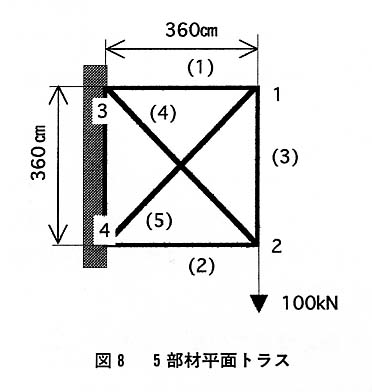
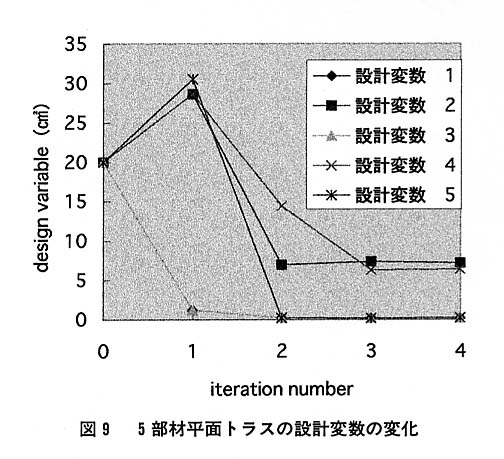
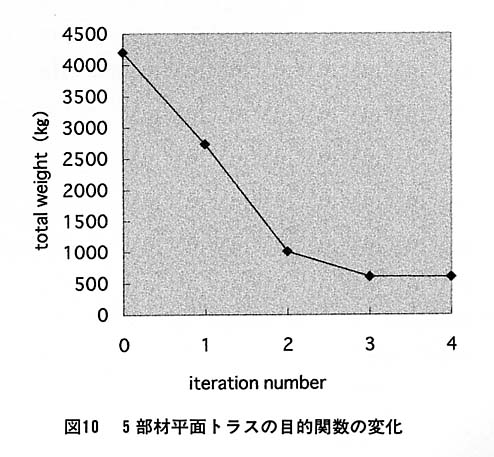
図8に示す5本部材の平面トラスの最適設計を行った。座標系としては節点4から節点2に向かう部材(2)に平行にx軸を,節点2から1に向かう部材(3)の向きにy軸をとる。設計変数を部材番号(1)から(5)の断面積として選択するとき,各初期値を20c㎡とする。ヤング率E=100GPa,密度γ=1.0×10-1kg/cm3とする。応力の上下限値はすべての部材について,それぞれ±0.25GPaとする。また,設計変数の上下限を0.1c㎡,50.0c㎡であると仮定する。図9には目的関数の履歴を示した。図10は横軸に設計段階を,縦軸に部材断面積をとり,設計変数の履歴を示す。最適解では,部材(2),(4)の応力制約条件がアクティブになり,部材(2)の応力が下限値に,部材(4)の応力が上限値に近づく。
5.まとめ
本プログラムは現実の問題にも十分適用できるので,結果として生きた形の知識を得ることができる。現在のプログラムでは座屈の制約条件は考慮されていない。より安全側の自動設計を行うためにも,トラス部材の座屈応力に関する制約条件の取り扱いは今後の課題としたい。
〈参考文献〉
- 1) G. N. Vanderplaats,Numerical Optimization Techniques for Engineering Design with Applications,McGraw-Hill.1984.
- 2) K. J. Bathe,E. L. Wilson,F. E. Peterson,SAP IV A Structural Analysis Program for Static and Dynamic Response of Linear Systems,Report No. EERC 73-11,Berkeley,UC., 1973.