4脚歩行ロボット設計・製作特集
- 機械系の能力開発1
- ポリテクカレッジ小山(小山職業能力開発短期大学校)大石 賢
1.はじめに
前任地のポリテクカレッジ岐阜のときから,卒業研究の課題としてロボットの製作を選び,実施してきました。
岐阜時代は,人間と五目並べを行うロボットの製作を課題としていました。初年度は市販の多関節型ロボット(三菱電気ムーブマスタRV-M1)および画像処理を組み合わせ,五目並べロボットとして一応の完成をみましたが,多関節ロボットを使用したため,基盤上をアプローチできる範囲が狭く,使い物になりませんでした。そこで,2年目,3年目にかけて平面へのアプローチが得意なスカラ型ロボットの設計・製作を行いました。
現在の施設(ポリテクカレッジ小山)にきてからも五目並べロボットの製作を続けようとも思いましたが,そろそろ課題に対する私自身の興味がうすれてきていたため,前々から興味を持っていた歩行ロボットをやってみることにしました。
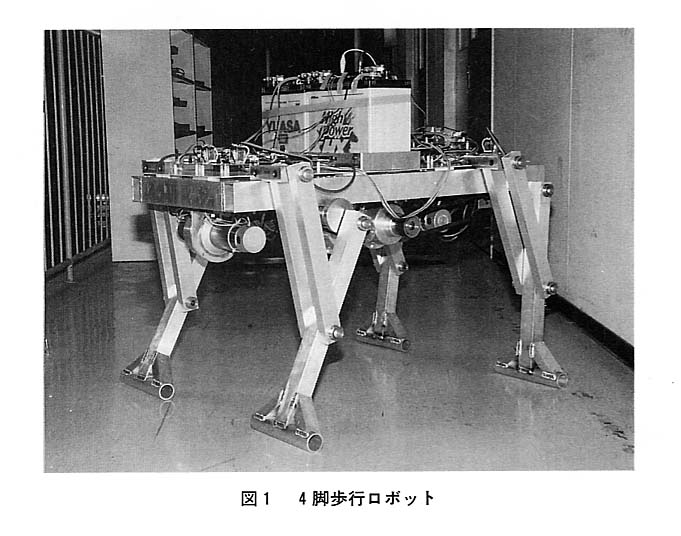
本年度(平成8年度)は,①ロボット機構の設計・製作,②脚単脚の制御,の2点を目標に,卒業研究を実施した結果,図1に示すような4脚のロボットを一応作りあげることができました。
以下,卒業研究を実施するうえでの課題の選定,年間スケジュール設定,および実施結果について述べたいと思います。
2.卒業研究構想
2.1 課題の選定
卒業研究の成否のポイントとなる課題の選定ですが,以下の点を考慮して行いました。
- ① 学生自身が興味を持って進められること
- ② 産業機械科で履修した講義,実習の応用的課題であること
- ③ 設計・製作・加工・組立といった一連のプロセスを経ないと作れないものであること
- ④ ある程度の加工技術を駆使しないと作れないものであること
以上の点を考慮し,本年度の卒業研究では,先にも述べたように4脚ロボットの設計・製作を課題として設定しました。
2.2 年間スケジュール
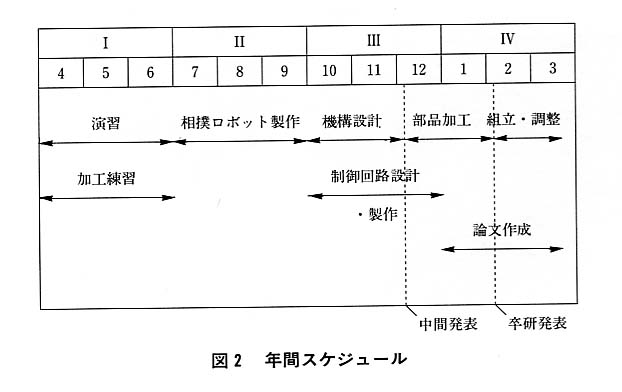
卒業研究を進めるにあたり,図2に示すように年間スケジュールを定めました。この際,全体を3ヵ月ごとに4つの期間に分割し,それぞれの期間に図示のようにメインとなる課題を設定しました。これは,課題の分割による目標の明確化を意図してのことです。
3.卒業研究実施結果
本年度は4名の卒研生が私の研究室に配属になったため,2項で述べた課題を,ロボット機械設計・製作,制御システム設計・製作の2点に分割し,機構班2名,制御班2名にて行わせることにしました。以下,本課題にて卒業研究を実施した結果を述べたいと思います。
3.1 第I期
第I期では,機構班,制御班とも,2項でも述べたように,主に卒業研究を行っていくうえで必要な設計の知識,加工技術等の付与を目標におきました。
設計面では,設計を進めていくうえで必要な工業力学,材料力学の演習,1年次で学んだ基礎製図の復習などを重点的に行いました。
加工面では,ロボット製作に必要な旋盤,フライス盤の練習を中心に行いました。課題を与え,これらを仕上げていくうえで,1年次の加工実習で習った主軸回転数の求め方,バイトの研ぎ方,段削りの仕方,六面体の作り方などの復習をし,さらに加工実習で未習のヘール仕上げ,ボーリングヘッドによる穴の仕上げなどの技能の練習をさせました。
3.2 第II期
第II期では,本格的に4脚歩行ロボットを設計・製作に取りかかる前の練習課題として,相撲ロボットを取り上げました。相撲ロボットを本期の課題として選んだのは以下のような理由です。
- ① 設計の練習
- ② マイコン・電子回路技術習得
- ③ 加工の練習
実際の製作にあたっては,大会等で優勝するのが目的ではなくあくまで練習課題なので,機構,回路構成ともシンプルにさせました。また,ただ作るだけだと学生も真剣味に欠けると思い,96年度の実践教育研究発表会の相撲ロボット大会への参加を目標として設定しました。
以上のことをふまえ,学生に設計・製作させた結果,図3に示すようなロボットが完成しました。
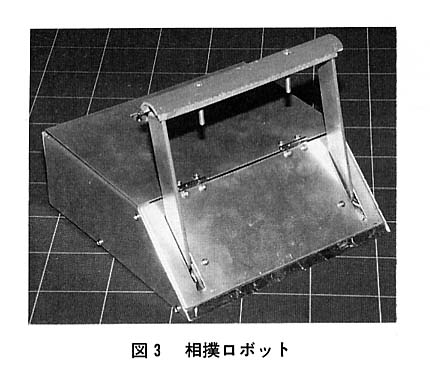
本ロボットを上記の大会へ参加させたところ,見事に1回戦敗退の結果となりました。これは,もともと勝つためのスペックになっていないものもありますが,実質上9月の1ヵ月弱しか相撲ロボット製作に費やせなかったため,プログラムのバグ取りがうまくいっていなかったのが大きかったようです。その後学生は悔しがって,自発的にプログラムの修正をしてまともに動くようになりました。
3.3 第III期
第III期では,メインの目標である4脚歩行ロボットの機構設計,加工,制御回賂の設計,製作を目標に進めました。
(1) 機構設計
まず機構設計ですが,以下の手順にて進めさせました。
- ① 仕様の設定
- ② 概略設計,概略図の作成
- ③ 詳細設計,計画図,部品図の作成
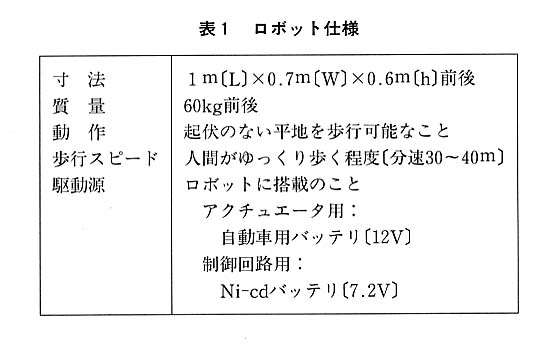
①の仕様の設定に際し,学生に要求したのは以下の点のみです。
・大きなロボット(全長1m前後,質量60kg前後)を作ること。
これは,2項の課題の選定のところで述べた,③設計・製作・加工・組立といった一連のプロセスを経ないと作れないものであること,④ある程度の加工技術を駆使しないと作れないものであること,といった事項を考慮してのことです。上記の点をふまえ,学生が設定した仕様を表1に示します。
次に概略設計ですが,ロボットによる歩行実現のため大きなポイントとなる,脚機構の検討および設計からとりかからせました。
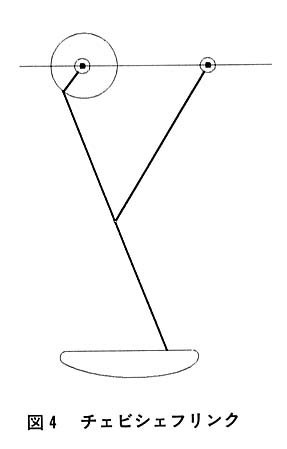
脚機構の選定にあたって,4脚歩行ロボットで使用される脚機構を調査させ,相談のうえ,製作時の実現性を考慮し,シンプルな構成ですむ,図4のチェビシェフリンク機構を選択させました。
脚機構の設計では,理想的な脚軌跡を得るため,チェビシェフリンクのリンク比の算出を主眼におきました。リンク比の決定にあたって,リンクシミュレータなどが手元になかったため,入力リンクを30度ごとに回転させ,各角度ごとに,リンクの姿勢および脚先端をグラフ用紙に重ねて描画していく方法をとりました。本方法にて大まかなリンク比を検討し,その後図5に示す実寸法の描画装置を作成し,本装置を用いて最終的なリンク比を決定しました。

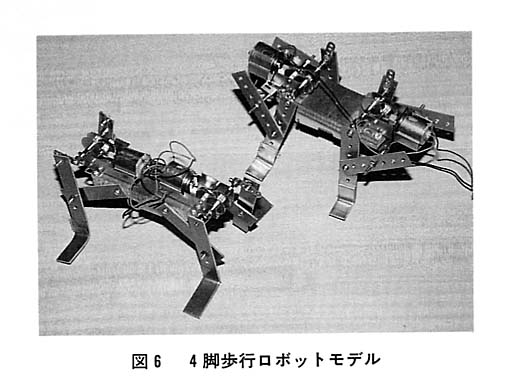
概略各図の作成にあたっては,段ボール用紙を用いた実寸モデルの製作,および図6に示す市販の工作用キットを用いた小型の実動モデルを製作させ,作図時にイメージしやすくなるようにしました。また,各部の強度設計に関しては,静定の片持ち梁,両端支持梁の問題に帰着させ,強度,たわみなどの検討をさせました。
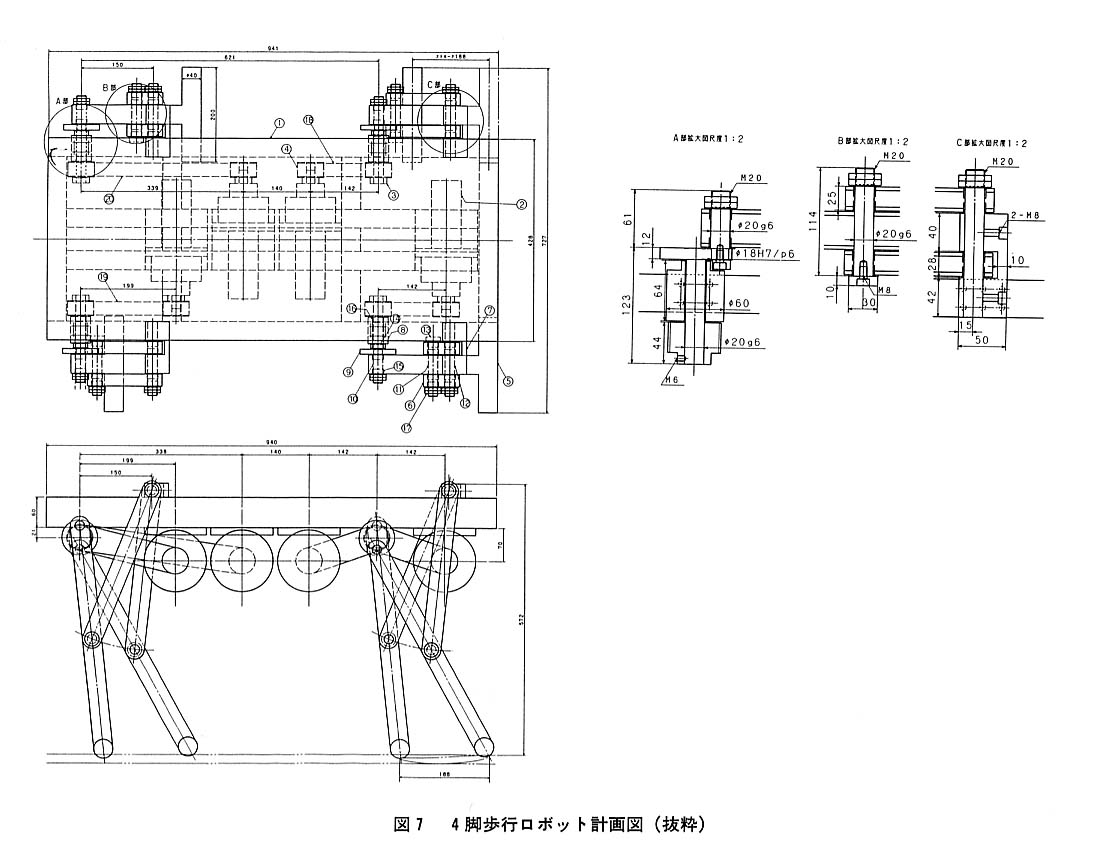
最後に③の詳細設計ですが,まず,概略設計時に作成した概略図をもとに,ロボットを実際に製作するうえでの問題点をあらい出させました。その結果,加工上困難な部分,強度的に不足する部分などが見つかりました。これらの問題に再検討を加え,最終的に,図7に示す計画図および,加工に必要な部品図を作成させました。
(2) 加工
先に述べた計画図,部品図をもとに,予定のように12月から1月にかけて部品加工をさせました。ウォームアップを兼ね,簡単な部品から製作させていきました。慣れてきたところを見計らって精度のいる部品,段取りをきちんとしなければできない部品に取りかからせましたが,このレベルの部品になってくるとなかなか目的のものが作れず,だいぶ苦労していました。しかし学生のがんばりにより,予定より3週間ほど早く1月の上旬には部品の加工を終えることができました。
なお,フレームの溶接に関しては私自身が経験ないため,当校の溶接のできる先生にお願いしました。
(3) 制御回路の設計・製作
制御回路の設計・製作ですが,1つのマイコンで制御させれば比較的簡単にすみますが,卒研の課題としては少々物足りない気がしましたので,ホスト1台,サブマイコン4台計5個のマイコンで制御させることにしました。さらに,モータの駆動回路も市販のものではなく,リレーとMOSFETのハイブリッド回路を作らせることにしました。製作時,単脚分のシステムは1月末にできあがりましたが,ホストマイコン,サブマイコンの通信に関しては結局3月の上旬ごろまでかかってしまいました。
3.4 第IV期
第IV期ではロボットの組立,調整,および論文作成を主な目標としました。加工が予定より早く終了したため,機構組立は,予定より1ヵ月早い1月末に終えることができました。単脚分の制御システムを組み付け,なんとか2月上旬に行われた発表会に,その動きを披露することができました。その後卒業論文を作成させつつ,ホスト,サブ間の通信により,ホストによる脚全体の統括をできるように卒研を続行させました。その結果3月の中ごろにはなんとか通信も可能になり,歩容の設計を行っていないためぎこちがないのですが,なんとかロボットを歩行させることができました。
4.おわりに
1年間4脚歩行ロボットの設計・製作を実施してみて,最終的には当初の目的のものを学生に作らせることができましたが,卒研の進め方などまだまだ,工夫の余地があったのではないかと現在では反省しております。
ただ,今回の卒研にて学生に多少なりとも満足感を与えることができよかったのではないかとも思っております。
おわりに,当校生産技術科杉本義徳氏には機構設計に際し,有益な助言をいただき,また,岩手県立産業技術短期大学校三浦公嗣氏には当校在籍時に溶接に際し大変お世話になりました。この場を借りてお礼申し上げます。