アミューズメントロボットの開発特集
- 機械系の能力開発6
- ポリテクカレッジ新潟(新潟職業能力開発短期大学校)滝本 雄一
1.はじめに
ロボットという言葉の定義について,一般的には生産ラインの自動化等に用いるアーム型ロボットを指す場合が多い。これは,従来よりロボットの用途が過酷で単調な作業を代行することを目的としていたためであるが,近年の産業構造の変化により,製造業においては大型設備投資による大量生産から多種少量生産へと変化し,産業界全体においても製造業からサービス業へと移行している。これらの背景より,今後のロボットの進出分野はサービス産業やその他特殊分野,例えば医療・福祉ロボット,防災・警備ロボット,家庭用ロボット等が考えられる。
いずれにしても一般的な産業用ロボットのような,あらかじめプログラムされた動作のみを行う(ティーチング・プレイバック方式)とは異なり,人間が操作・補助を行い,人と融合して動作するものでなければならない。そこで卒業研究のテーマとして,産業用ロボットとは一線を画し,アミューズメント用途にも対応可能な,機械と人間が融合し一体となって動作するロボット(マニュピレータ)の試作機の製作を行うことにした。
2.ロボット本体
ロボットの基本的な考え方は,アミューズメント用途(疑似体験シミュレータ等)に対応可能なものとするため,人間の胴体から上の動きを後述するコントローラで忠実にトレースし,その動きにリアルタイムで動作するマスタ・スレーブマニュピレータ方式を採用した。
基本仕様は以下のとおりである。
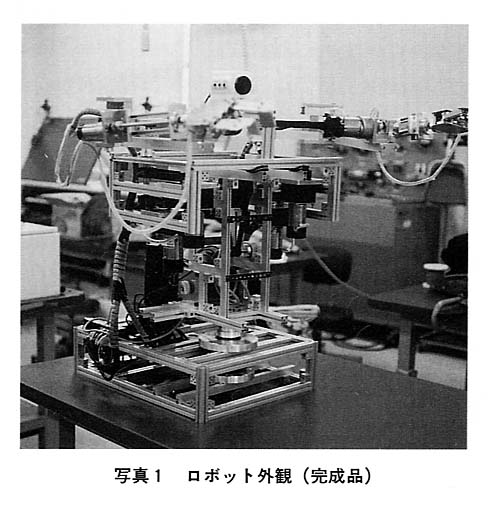
① 図1,写真1に示すようにロボットは胴体部と2本の腕部とに分けられ,それぞれの関節数は胴体2,腕1本につき4とした。
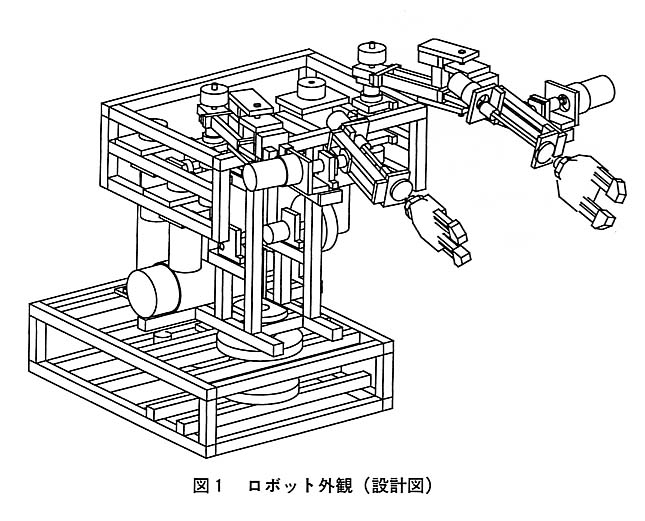
② 腕部の関節は,肩の左右・肘の左右・手首の上下・手首の回転の4つ。
③ 本体中心部に人の目の役割をするセンサとしてカラーCCDカメラを取り付け,胴体部の上下/左右の動作により目線を変化させる。
④ 関節部には制御性がよいDCサーボモータを用い,制御範囲は人の腕の速い動きにも対応できるように0~60rpmとした。
⑤ 人の動きをすばやく忠実にトレースすることを目的としているため,負荷は空き缶程度とし,それに対応する機械的な剛性はある程度無視した。それよりも速度を重視し,モータの負荷軽減のために,アルミフレームの採用による軽量化,部品点数の省略化等を行い,慣性モーメントを少なくするようにした。
3.コントローラ
コントローラは,操作員の腕の自然な動きをそのままロボットへ伝えることができるよう,一般的に用いられるようなジョイスティック形状のものと異なり,写真2に示すようにロボットと同じ多関節を持つ形状とした。これはロボット本体の腕部と同じ腕1本につき4つの関節を持ち,それぞれが人間の関節を正確にトレースするセンサとしてロータリエンコーダを装着している。
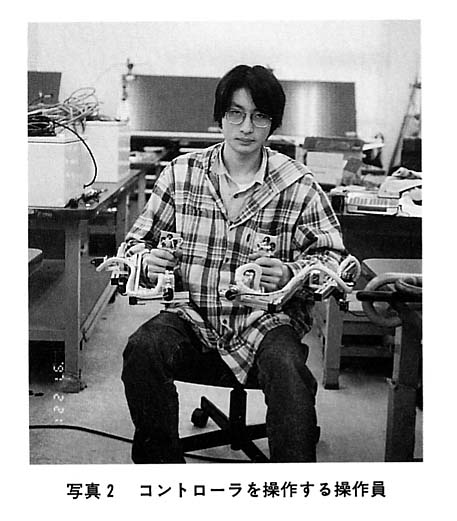
また,操作員の頭部には3次元加速度センサを取り付けて,その頭の動きに連動してロボット本体中央に取り付けてあるカラーCCDカメラの目線を変化させるため,胴体部が上下左右に動作する。
コントローラは,人が操作しやすいよう市販のOAチェアを改造して取り付けてあり,人が座った状態で自然に操作が可能である。
■センサ仕様
(1) 光学式ロータリエンコーダ
出力:5V電圧パルス
相数:A・B相
分解能:200pulse/rev(コンピュータにより2逓倍処理を行っているため,実際は400pulse/rev)
(2) 3次元加速度センサ
バーチャルリアリティセンサを応用
出 力:ロール角・ピッチ角・方位角
角速度:±300°/s以下
検出角:ロール角 ±60°
ピッチ角 ±60°
方位角 ±180°
出 力:RS-232Cによるシリアルデータ
4.マンマシンコミュニケーション
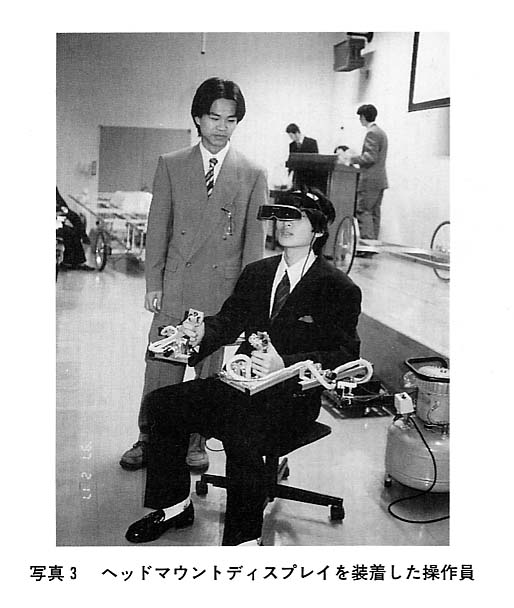
人間がロボットと融合して一体となって動作しているような疑似体験を実現させるために,ロボットからのカラーCCDカメラ映像は画像処理装置を通してターゲットの形状・色等の情報を抽出し,写真3のように操作員が装着しているヘッドマウントディスプレイに画像情報を含めて出力する。
■構成部品仕様
(1) カラーCCDカメラ
撮像素子:1/4インチ固定撮像素子41万画素
レンズ:10倍ズームレンズ デジタルズーム
映像出力:NTSC準拠
(2) 画像処理装置
PC/AT互換機仕様の工業用パソコンにカラー画像入出カボードを装着
映像入力:NTSC準拠
映像出力:NTSC準拠
デジタル処理:8ビットA/D・D/Aコンバータ
フレームメモリ:1024×512×8ビットRGB
(3) ヘッドマウントディスプレイ
ディスプレイ:LCD
映像入力:NTSC準拠
5.システム構成
全体のシステム構成は図2のように5つのユニットで構成され,各部の機能を以下に示す。
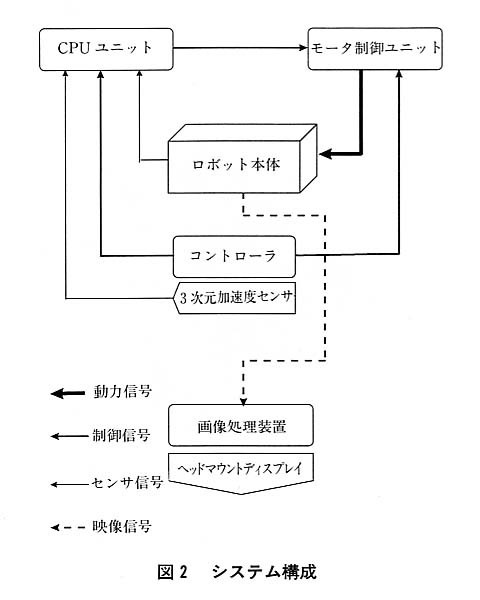
- ① ロボット各部の関節を駆動するサーボモータはモータ制御ユニットにより駆動され,その回転角度はCPUユニットにフィードバックされる。
- ② モータ制御ユニットはCPUユニットとコントローラの操作信号をもとに各関節駆動動力を供給する。
- ③ CPUユニットはコントローラから操作員の腕の角度・頭の角度の信号とロボットからフィードバックされた各関節角度信号をもとに操作出力を算出する。
- ④ コントローラは操作員の腕の角度・頭の角度およびロボットハンド部の開閉信号を出力する。
- ⑤ ロボットのCCDカメラ映像は画像処理装置により画像を加工し,操作員の装着するヘッドマウントディスプレイに出力する。
6.モータ制御ユニット
ロボット各関節を駆動するサーボモータを,瞬時に変化する負荷に対応して正確に角度制御を行うために,デジタル信号をもとに負荷トルクを制御することができる専用のICを用いた。またこのICに対するトルク指令は,コンピュータからのデジタル信号を外付けの8ビットD/AコンバータとIC内蔵の4ビットD/Aコンバータを用いて変換している。
■モータドライバ回路仕様
名 称:フルブリッジ・モータドライバ
出 力:最大定格 3A 55V
制御方式:電流スレッショルドによるチョッパ制御
モータ電流設定:内蔵4ビットDAC
外部8ビットDAC
7.CPUユニット
ロボットの全関節,計10軸の関節をリアルタイムでデジタルフィードバック制御するためには,通常は専用の高速プロセッサを用いることが多いが,高価でありプログラムも複雑になる。そこで複数の汎用マイコンを通信を行いながら同時処理させるマルチプロセッサシステムを構築し,複数のタスクのリアルタイム処理を可能にしている。
具体的には図3のように1軸に対し1つの軸制御CPUとマスタCPUの計11のCPUを同時処理させている。
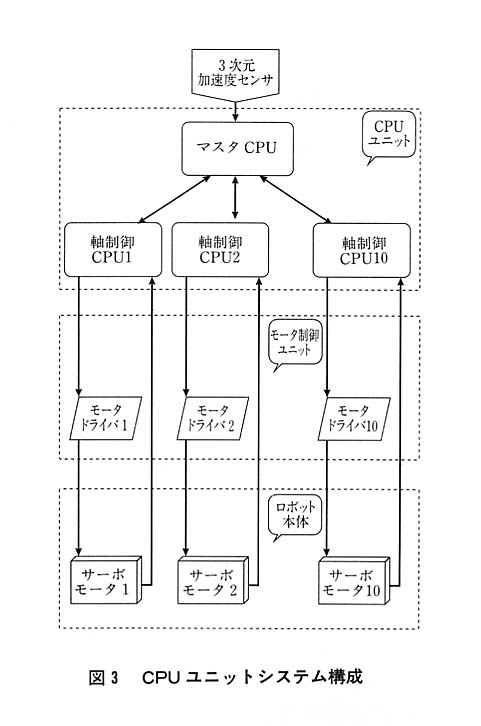
軸制御CPUではサーボモータからのパルス信号をもとに制御ループを構成し,1msの制御周期でフィードバック制御を行っている。
マスタCPUでは軸制御CPUの通信制御を一括で行っており,2.5Mbpsの伝送速度ですべてのCPUにおいてセンサ信号の情報を共有している。またマスタCPUより各軸の情報をもとに軸制御CPUに対してカスケードで補正信号を送っている。
8.おわりに
本試作機の技術をもとにして以下のような応用が考えられる。
- ① 産業用としては特殊作業用ロボット等,例えば消防ロボット・高所作業ロボット・危険場所作業ロボット
- ② アミューズメント用としては体感型シミュレータ等,例えば体感型対戦ゲーム
さらに,CCDカメラ映像にVR(バーチャルリアリティ)技術を応用した3次元アニメーション映像を合成させることで,より臨場感のある疑似体験を可能にすることができる。
最後に,卒業研究として本ロボットの設計・製作まですべてを行った,制御技術科の学生諸君に深く感謝いたします。